
The graph above shows the angular velocity of a spinning wheel (radius = \( 25 \) \( \text{cm} \)) as a function of time.
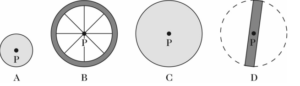
The figure shows scale drawings of four objects, each of the same mass and uniform thickness, with the mass distributed uniformly. Which one has the greatest moment of inertia when rotated about an axis perpendicular to the plane of the drawing at point P?
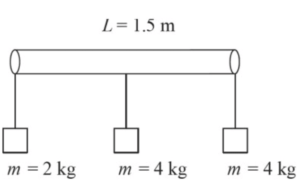
Three masses are attached to a \( 1.5 \, \text{m} \) long massless bar. Mass 1 is \( 2 \, \text{kg} \) and is attached to the far left side of the bar. Mass 2 is \( 4 \, \text{kg} \) and is attached to the far right side of the bar. Mass 3 is \( 4 \, \text{kg} \) and is attached to the middle of the bar. At what distance from the far left side of the bar can a string be attached to hold the bar up horizontally?

A sphere starts from rest and rolls down an incline of height \( H = 1.0 \) \( \text{m} \) at an angle of \( 25^\circ \) with the horizontal, as shown above. The radius of the sphere \( R = 15 \) \( \text{cm} \), and its mass \( m = 1.0 \) \( \text{kg} \). The moment of inertia for a sphere is \( \frac{2}{5}mR^2 \). What is the speed of the sphere when it reaches the bottom of the plane?
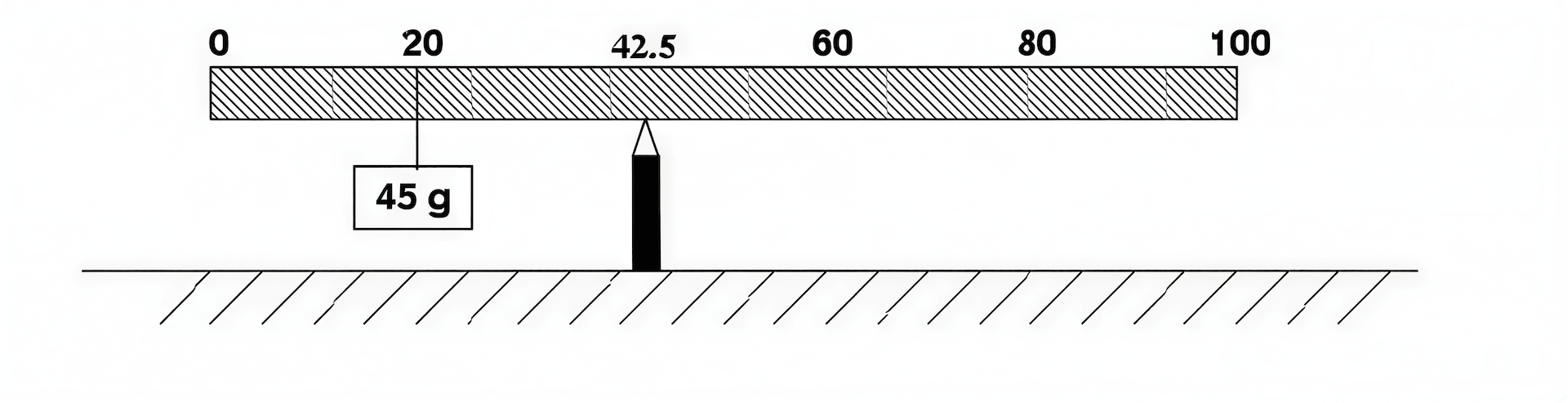
A uniform meter stick has a mass of \( 45.0 \) \( \text{g} \) placed at the \( 20 \) \( \text{cm} \) mark. If a pivot is placed at the \( 42.5 \) \( \text{cm} \) mark and the meter stick remains horizontal in static equilibrium, what is the mass of the meter stick?



