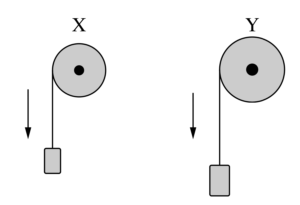
Pulleys \( X \) and \( Y \) are each attached to a block by a string that wraps around the pulley. Both blocks are released and have the same linear acceleration \( a \). As the blocks fall, the pulleys rotate about their centers. Pulley \( Y \) has a larger radius than Pulley \( X \). How does the angular acceleration \( \alpha_X \) of Pulley \( X \) compare to the angular acceleration \( \alpha_Y \) of Pulley \( Y \)?
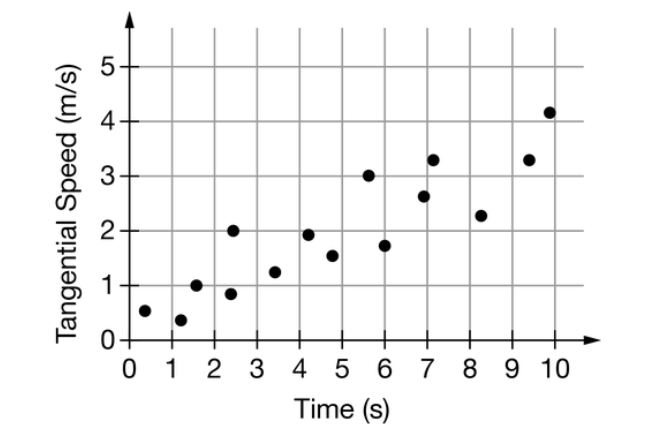
In an experiment, an external torque is applied to the edge of a disk of radius \( 0.5 \) \( \text{m} \) such that the edge of the disk speeds up as it continues to rotate. The tangential speed as a function of time is shown for the edge of the disk. The rotational inertia of the disk is \( 0.125 \) \( \text{kg} \cdot \text{m}^2 \). Can a student use the graph and the known information to calculate the net torque exerted on the edge of the disk?

A meter stick with a uniformly distributed mass of \(0.5 \, \text{kg}\) is supported by a pivot placed at the \(0.25 \, \text{m}\) mark from the left. At the left end, a small object of mass \(1.0 \, \text{kg}\) is placed at the zero mark, and a second small object of mass \(0.5 \, \text{kg}\) is placed at the \(0.5 \, \text{m}\) mark. The meter stick is supported so that it remains horizontal, and then it is released from rest. Find the change in the angular momentum of the meter stick, one second after it is released.
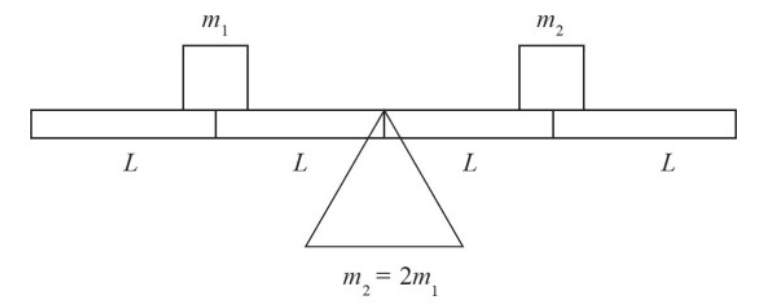
The system above is NOT balanced since \(m_2\) is twice the mass of \(m_1\). Which of the following changes would NOT balance the system so that there is 0 net torque? Assume the plank has no mass of its own.



