
A massless rigid rod of length [katex]3d[/katex] is pivoted at a fixed point [katex]W[/katex], and two forces each of magnitude [katex]F[/katex] are applied vertically upward as shown above. A third vertical force of magnitude [katex]F[/katex] may be applied, either upward or downward, at one of the labeled points. With the proper choice of direction at each point, the rod can be in equilibrium if the third force of magnitude [katex]F[/katex] is applied at point?

In lacrosse, a typical throw is made by rotating the stick through an angle of roughly \(90^\circ\), then releasing the ball when the stick is vertical, as shown above. If the \(1 \, \text{meter}\) long stick is at rest when horizontal and the ball leaves the stick with a velocity of \(10 \, \text{m/s}\), what angular acceleration must the stick experience?
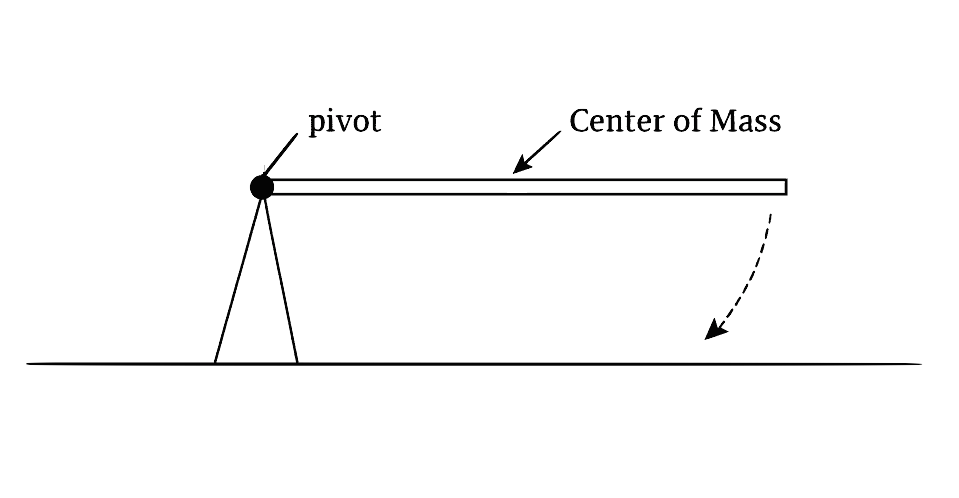
A uniform rod of length \( L \) and mass \( M \) is free to rotate about one end, as shown in the diagram. The free end is released from rest at a horizontal position, as shown. The pivot point is supported by a stand so that only the free end can move. The moment of inertia of a rod about its end is \(\tfrac{1}{3} M L^{2}\).

A uniform, rigid rod of length \( 2 \) \( \text{m} \) lies on a horizontal surface. One end of the rod can pivot about an axis that is perpendicular to the rod and along the plane of the page. A \( 10 \) \( \text{N} \) force is applied to the rod at its midpoint at an angle of \( 37^{\circ} \). A second force \( F \) is applied to the free end of the rod so that the rod remains at rest, as shown in the figure. The magnitude of the torque produced by force \( F \) is most nearly
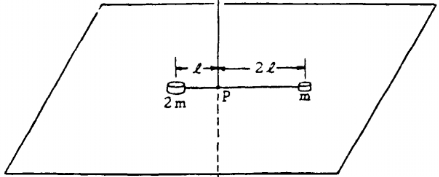
A system consists of two small disks, of masses \( m \) and \( 2m \), attached to a rod of negligible mass of length \( 3l \) as shown above. The rod is free to turn about a vertical axis through point \( P \). The two disks rest on a rough horizontal surface; the coefficient of friction between the disks and the surface is \( \mu \). At time \( t = 0 \), the rod has an initial counterclockwise angular velocity \( \omega_0 \) about \( P \). The system is gradually brought to rest by friction. Develop expressions for the following quantities in terms of \( \mu \), \( m \), \( l \), \( g \), and \( \omega_0 \).

A sphere starts from rest and rolls down an incline of height \( H = 1.0 \) \( \text{m} \) at an angle of \( 25^\circ \) with the horizontal, as shown above. The radius of the sphere \( R = 15 \) \( \text{cm} \), and its mass \( m = 1.0 \) \( \text{kg} \). The moment of inertia for a sphere is \( \frac{2}{5}mR^2 \). What is the speed of the sphere when it reaches the bottom of the plane?



