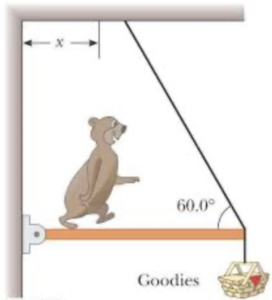
A hungry bear weighing 700 N walks out on a beam in an attempt to retrieve a basket of goodies hanging at the end of the beam. The beam is uniform, weighs 200 N, and is 6.00 m long. The goodies weigh 80 N.
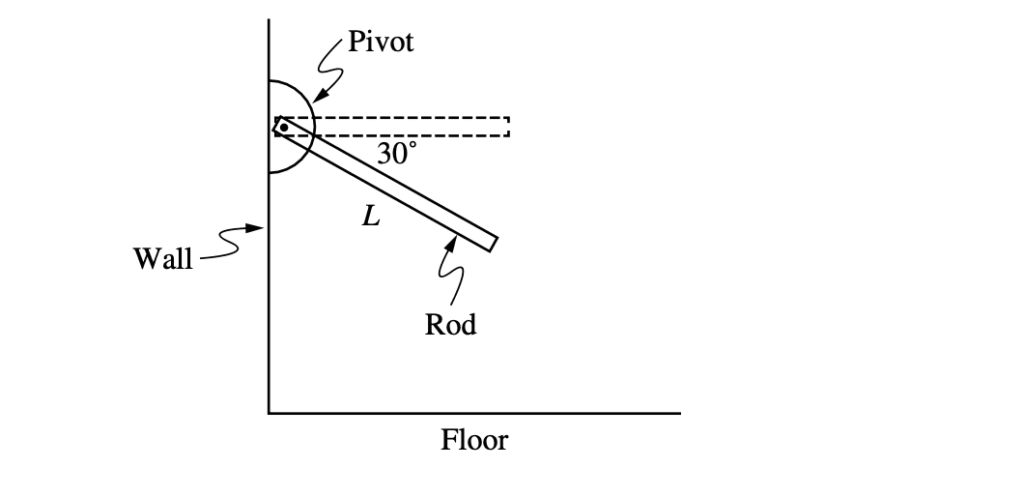
A uniform rod of mass \( M_0 \) and length \( L \) is free to rotate about a pivot at its left end and is released from rest when the rod is \( 30^{\circ} \) below the horizontal, as shown in the figure. With respect to the pivot, the rod has rotational inertia \( I_0 = \dfrac{1}{3} M_0 L^2 \). Which of the following expressions correctly represents the magnitude of the net torque exerted on the rod about the pivot at the moment the rod is released?
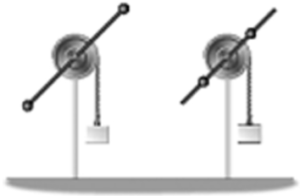
The rotating systems, shown in the figure above, differ only in that the two identical movable masses are positioned a distance r from the axis of rotation (left), or a distance r/2 from the axis of rotation (right). What happens if you release the hanging blocks simultaneously from rest?
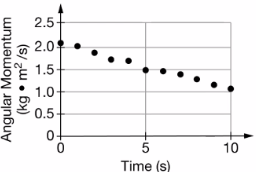
During the experiment, students collect data about the angular momentum of a rigid, uniform spinning wheel about an axle as a function of time, which was used to create the graph that is shown. A frictional torque is exerted on the wheel. A student makes the following statement about the data. “The frictional torque exerted on the wheel is independent of the wheel’s angular speed.” Does the data from the graph support the student’s statement? Justify your selection.



