
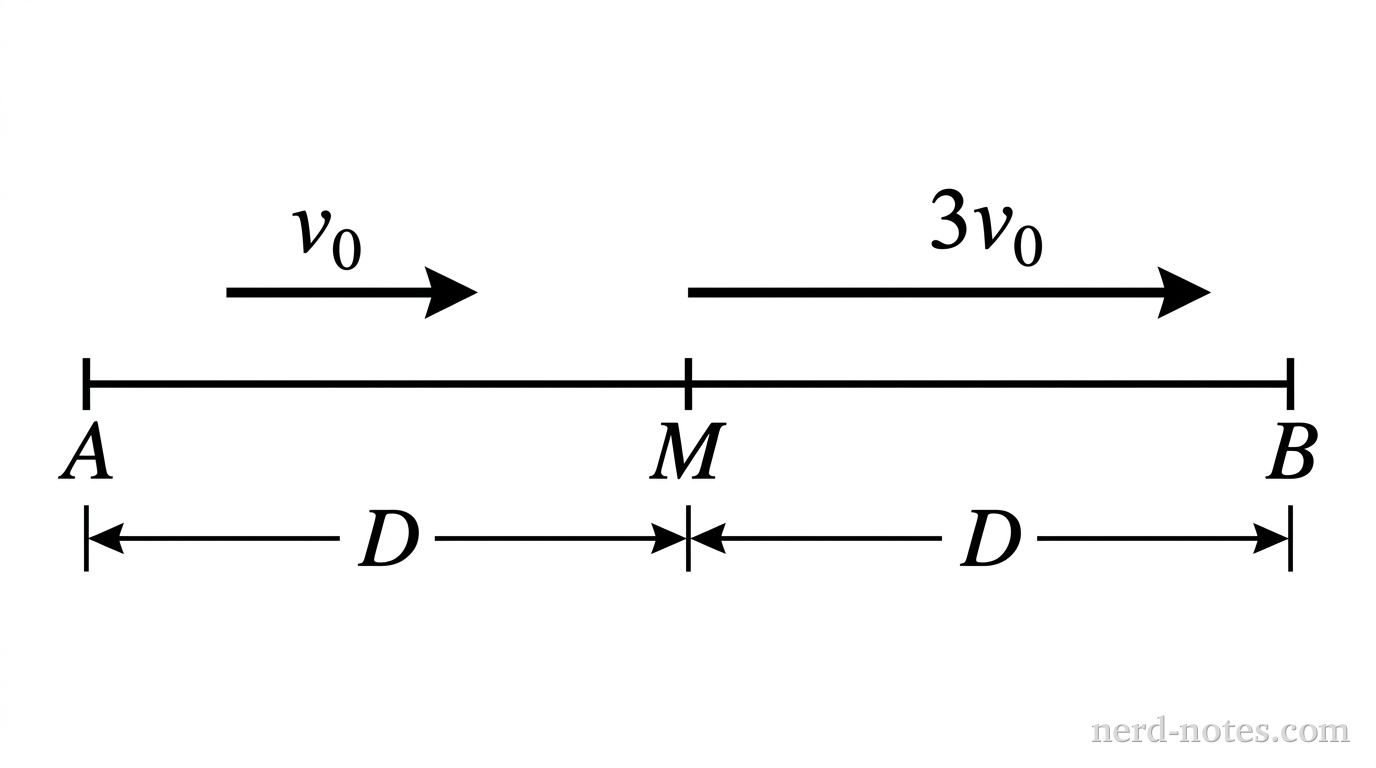
A car travels along a straight road between two cities separated by a total distance of \(2D\). The car travels the first distance \(D\) at a constant speed \(v_0\) and the remaining distance \(D\) at a constant speed \(3v_0\). Which of the following correctly identifies the average speed \(v_{avg}\) of the car for the entire trip and provides a valid justification?
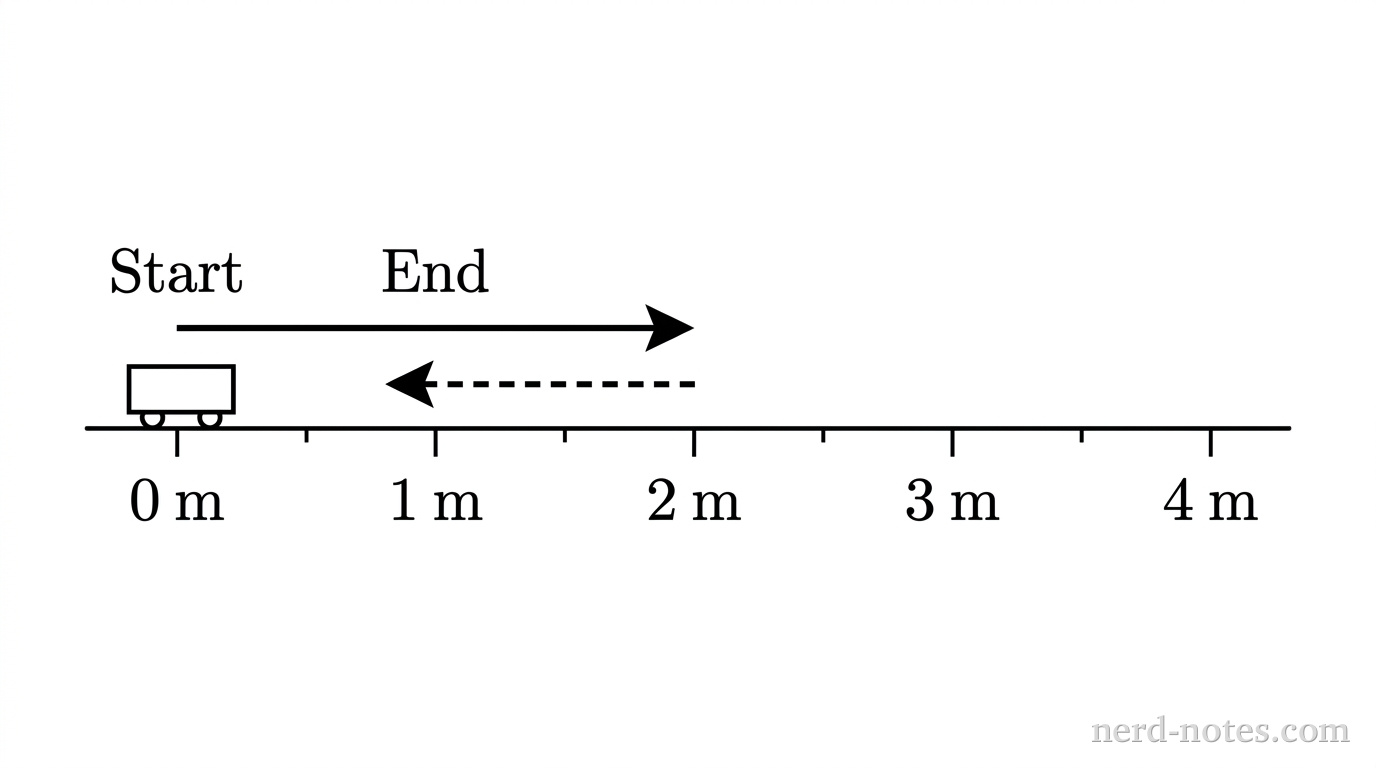
A student conducts a laboratory experiment where a cart is moved \(2.0 \text{ m}\) to the right and then \(1.0 \text{ m}\) to the left along a straight, horizontal track. The student calculates the total distance traveled and the final displacement of the cart. Which of the following correctly classifies these quantities and provides a valid justification?
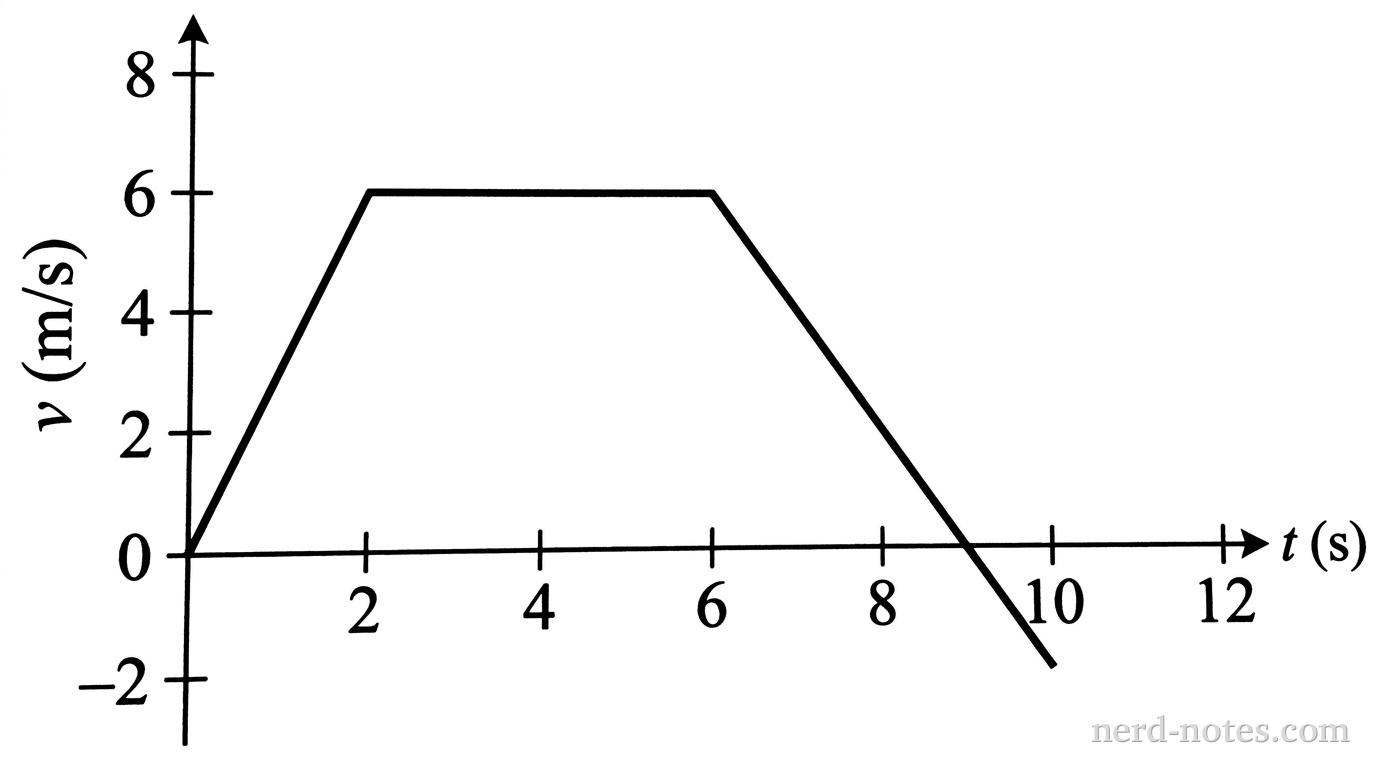
An experimental automated cart is tested on a linear track. A computer-controlled sensor measures the cart’s velocity \(v\) as a function of time \(t\), as shown in the graph. What is the displacement of the cart during the time interval from \(t = 0 \text{ s}\) to \(t = 10 \text{ s}\)?
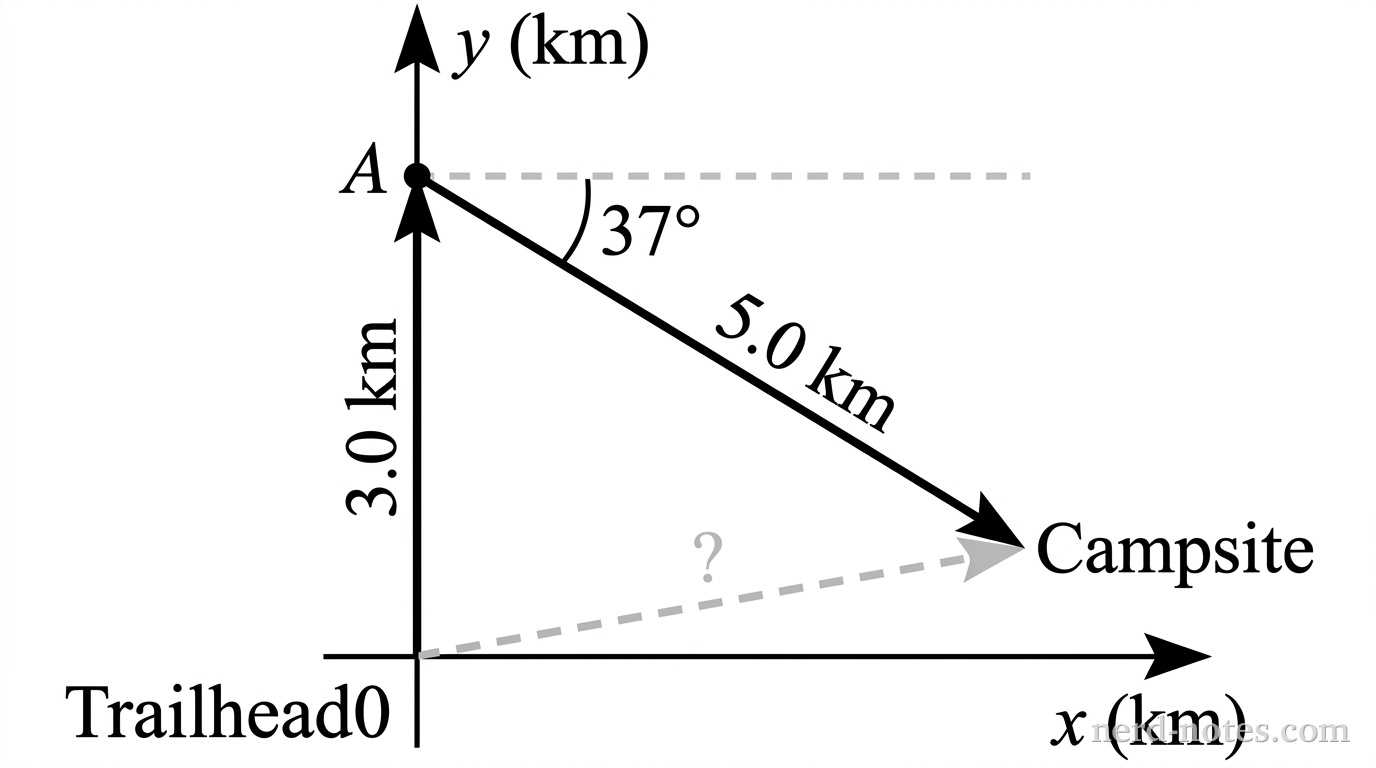
A hiker starts at a trailhead and walks \(3.0 \text{ km}\) due North. The hiker then turns and walks \(5.0 \text{ km}\) in a direction \(37^\circ\) South of East to reach a campsite. (Note: \(\sin 37^\circ \approx 0.60\); \(\cos 37^\circ \approx 0.80\)). What is the magnitude of the hiker’s total displacement from the trailhead to the campsite?
A laboratory cart is restricted to motion along a horizontal track. A motion sensor records the direction of the cart’s velocity and the direction of its acceleration at three different times, as shown in the table below.
| Time | Direction of Velocity | Direction of Acceleration |
| :— | :— | :— |
| \(t_1\) | Right | Left |
| \(t_2\) | Left | Left |
| \(t_3\) | Left | Right |
Which of the following correctly describes the motion of the cart at each time?
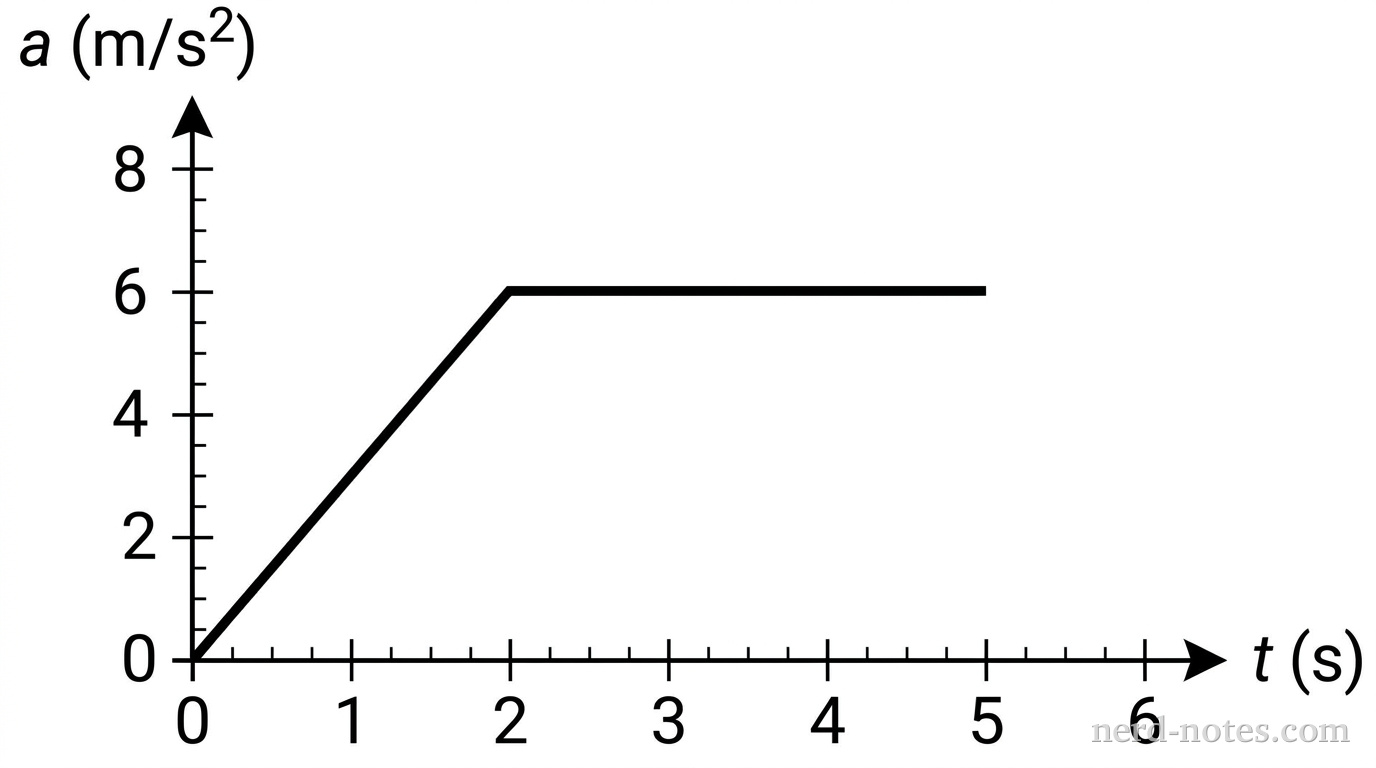
A test rocket moves along a straight, horizontal track. A sensor records the rocket’s acceleration as a function of time, as shown in the graph below.
What is the average acceleration of the rocket during the time interval from \(t = 0 \text{ s}\) to \(t = 5 \text{ s}\)?
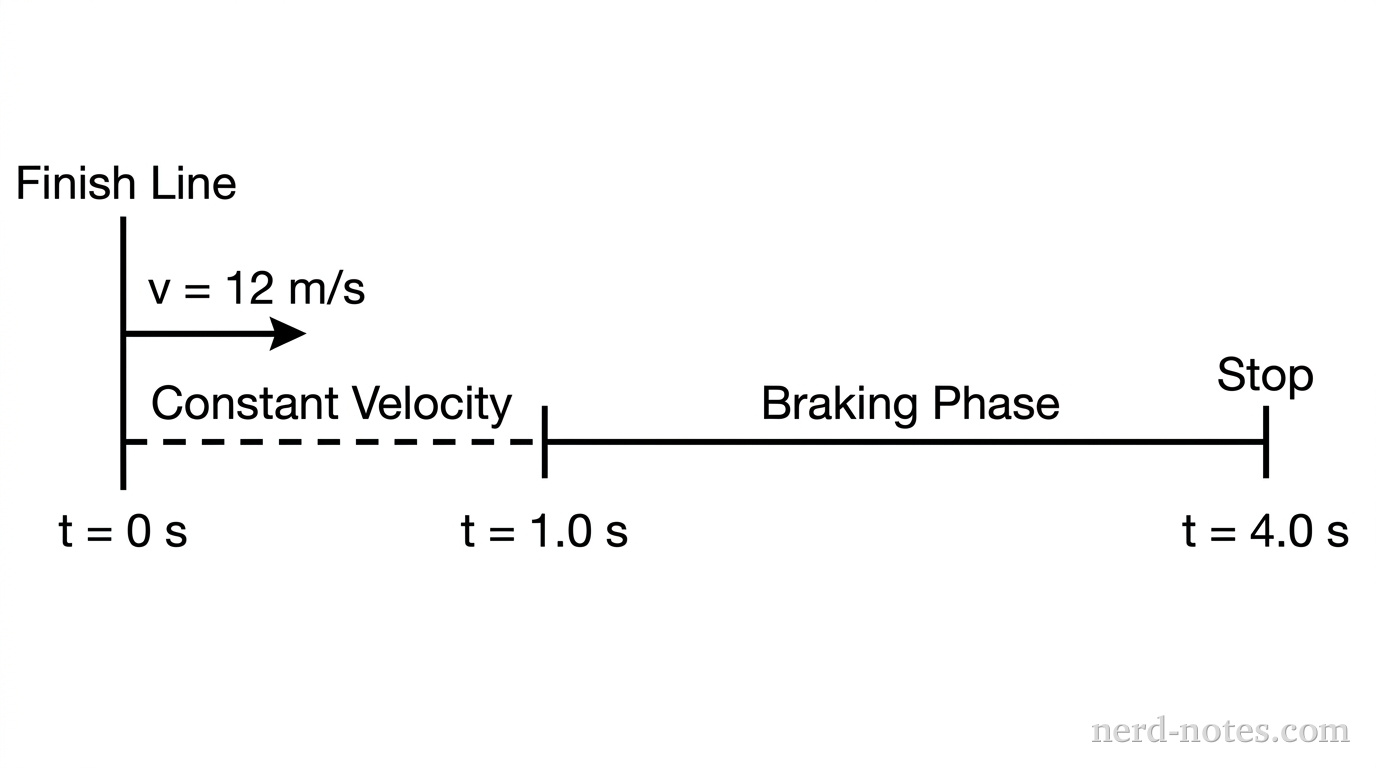
A sprinter crosses the finish line of a race moving with a velocity of \(12 \text{ m/s}\). The sprinter continues to run at this constant velocity for a reaction time of \(1.0 \text{ s}\) before beginning to slow down with a constant acceleration. If the sprinter comes to a complete stop exactly \(4.0 \text{ s}\) after crossing the finish line, what is the magnitude of the sprinter’s acceleration during the braking phase?
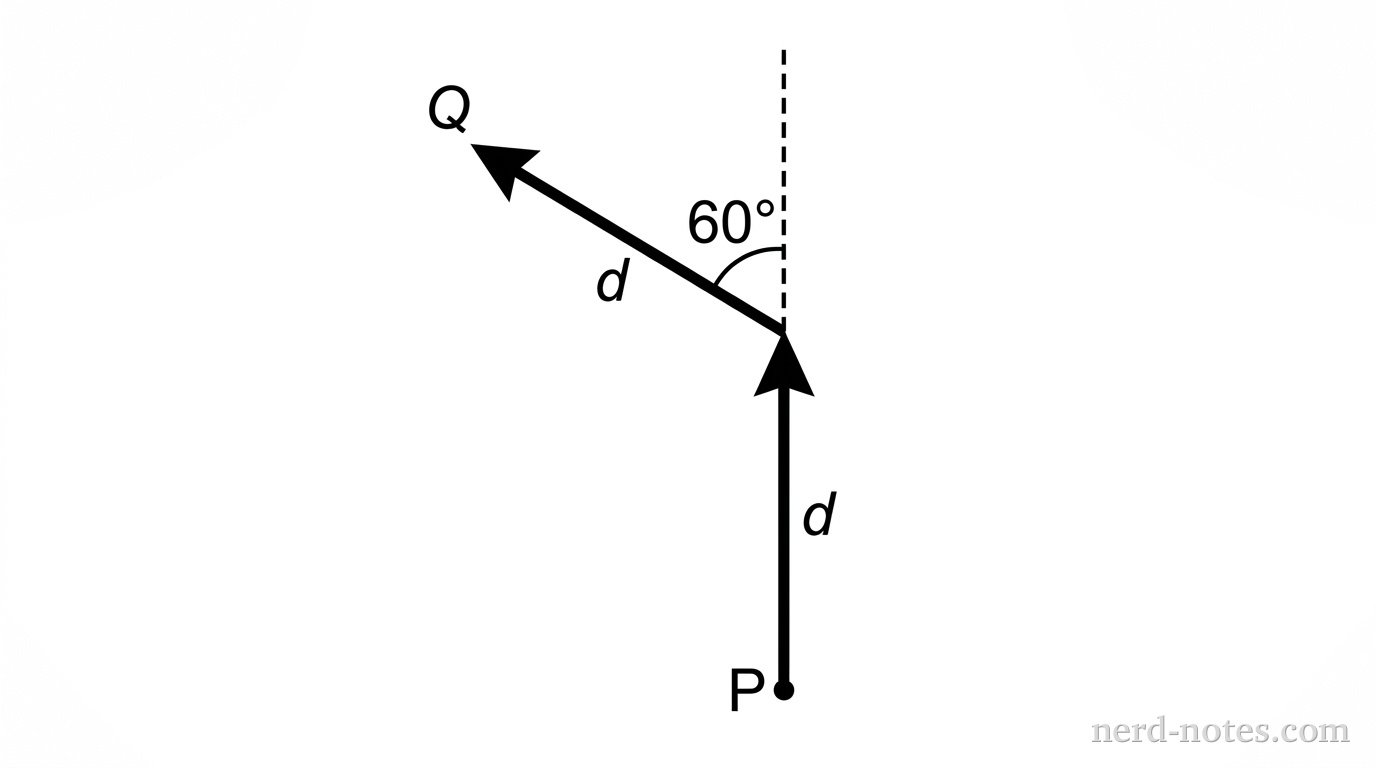
A surveyor starts at point \(P\) and walks a distance \(d\) due north. The surveyor then turns and walks an equal distance \(d\) in a direction \(60^{\circ}\) west of north to reach point \(Q\). What is the magnitude of the surveyor’s total displacement from point \(P\) to point \(Q\)?
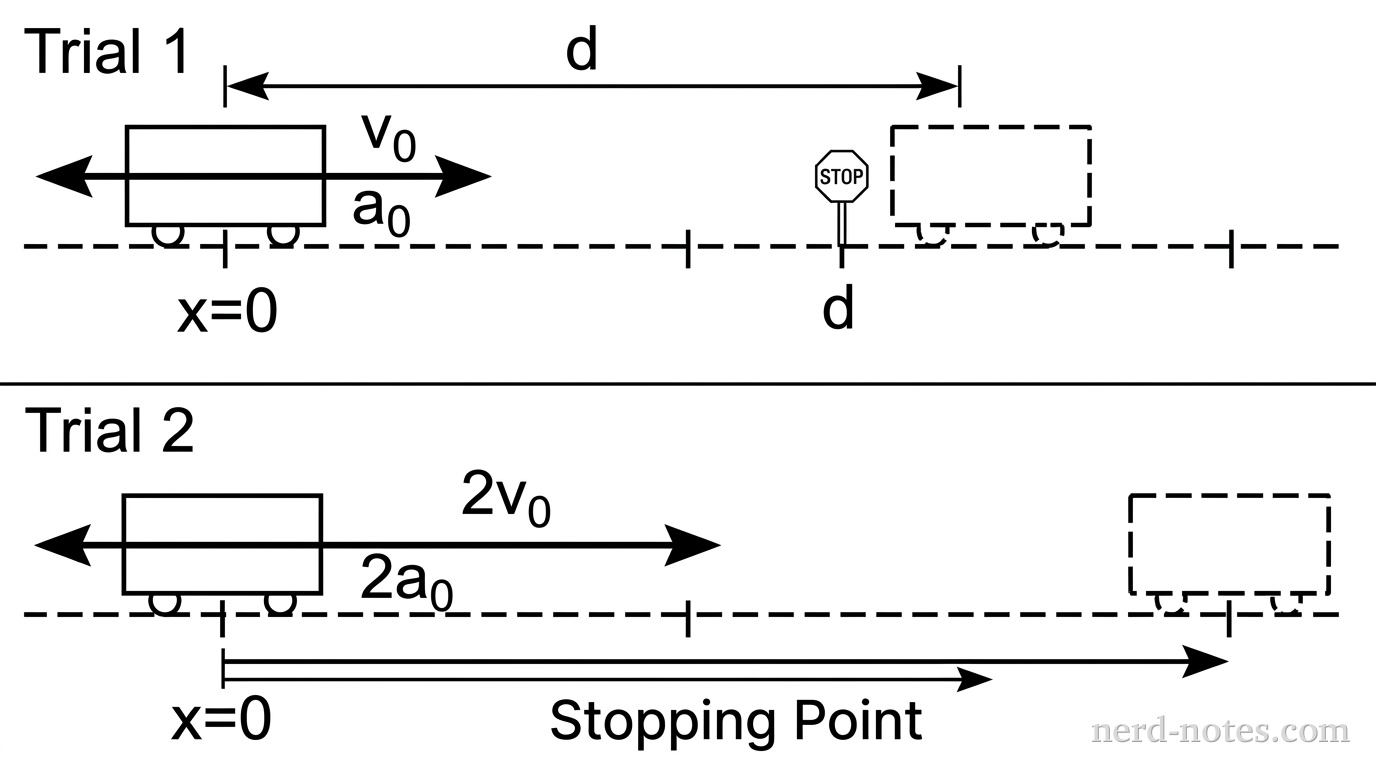
A train is traveling at a constant speed \( v_0 \) when the engineer applies the brakes, resulting in a constant deceleration of magnitude \( a_0 \) that brings the train to a stop in a distance \( d \). In a second trial, the train is traveling at a speed \( 2v_0 \) when the brakes are applied and is brought to a stop with a constant deceleration of magnitude \( 2a_0 \). Which of the following is the stopping distance for the train in the second trial?
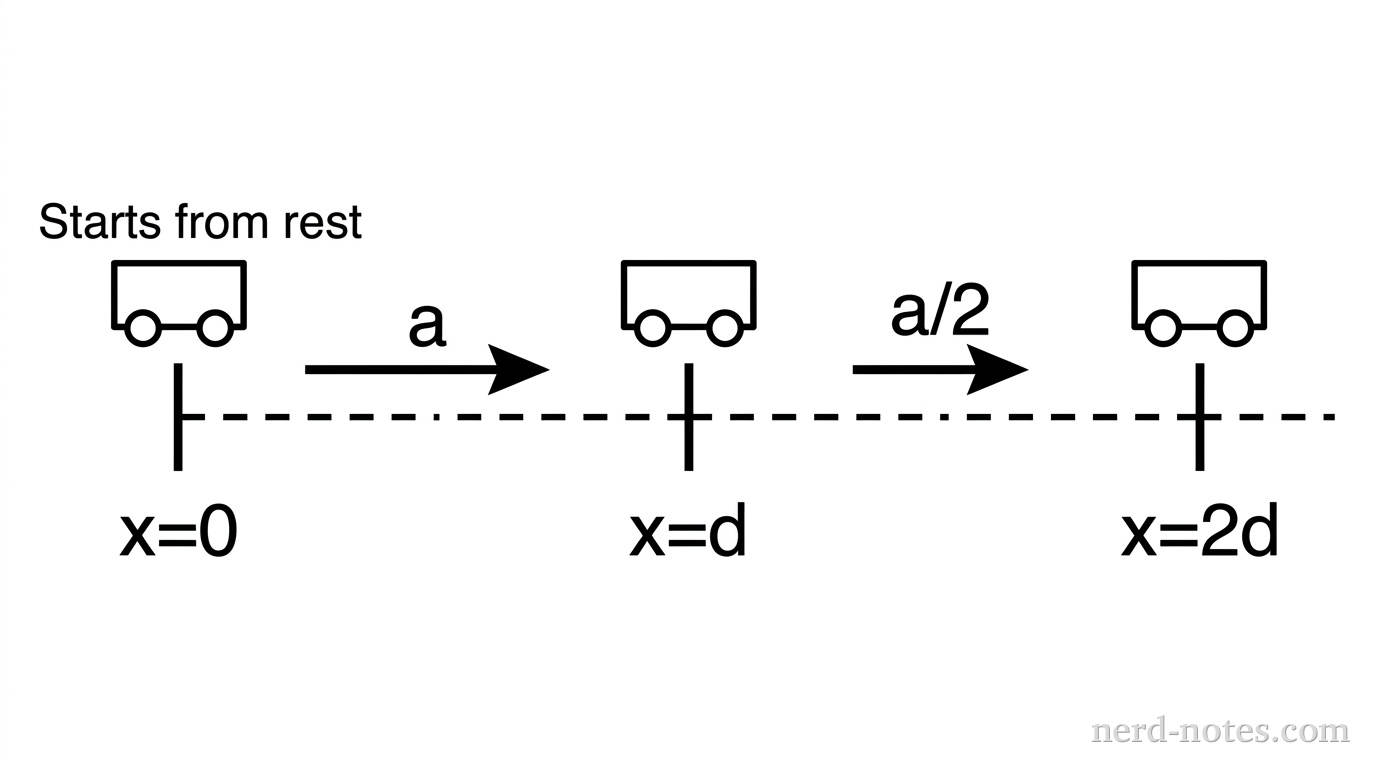
A small experimental vehicle starts from rest and accelerates with a constant acceleration \(a\) over a horizontal distance \(d\). After this distance, the vehicle’s engine is adjusted such that it continues to accelerate at a constant rate of \(\dfrac{a}{2}\) for an additional horizontal distance \(d\). Which of the following expressions represents the speed of the vehicle after it has traveled the total distance \(2d\)?



