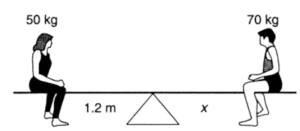
A \( 50 \, \text{kg} \) person is sitting on a seesaw \( 1.2 \, \text{m} \) from the balance point. On the other side, a \( 70 \, \text{kg} \) person is balanced. How far from the balance point is the second person sitting?

A uniform, rigid rod of length \( 2 \) \( \text{m} \) lies on a horizontal surface. One end of the rod can pivot about an axis that is perpendicular to the rod and along the plane of the page. A \( 10 \) \( \text{N} \) force is applied to the rod at its midpoint at an angle of \( 37^{\circ} \). A second force \( F \) is applied to the free end of the rod so that the rod remains at rest, as shown in the figure. The magnitude of the torque produced by force \( F \) is most nearly
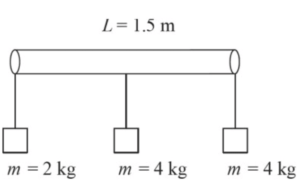
Three masses are attached to a \( 1.5 \, \text{m} \) long massless bar. Mass 1 is \( 2 \, \text{kg} \) and is attached to the far left side of the bar. Mass 2 is \( 4 \, \text{kg} \) and is attached to the far right side of the bar. Mass 3 is \( 4 \, \text{kg} \) and is attached to the middle of the bar. At what distance from the far left side of the bar can a string be attached to hold the bar up horizontally?



