

A uniform, rigid rod of length \( 2 \) \( \text{m} \) lies on a horizontal surface. One end of the rod can pivot about an axis that is perpendicular to the rod and along the plane of the page. A \( 10 \) \( \text{N} \) force is applied to the rod at its midpoint at an angle of \( 37^{\circ} \). A second force \( F \) is applied to the free end of the rod so that the rod remains at rest, as shown in the figure. The magnitude of the torque produced by force \( F \) is most nearly
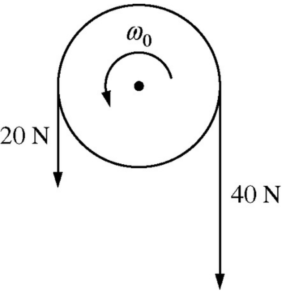
A disk is initially rotating counterclockwise around a fixed axis with angular speed \( \omega_0 \). At time \( t = 0 \), the two forces shown in the figure above are exerted on the disk. If counterclockwise is positive, which of the following could show the angular velocity of the disk as a function of time?
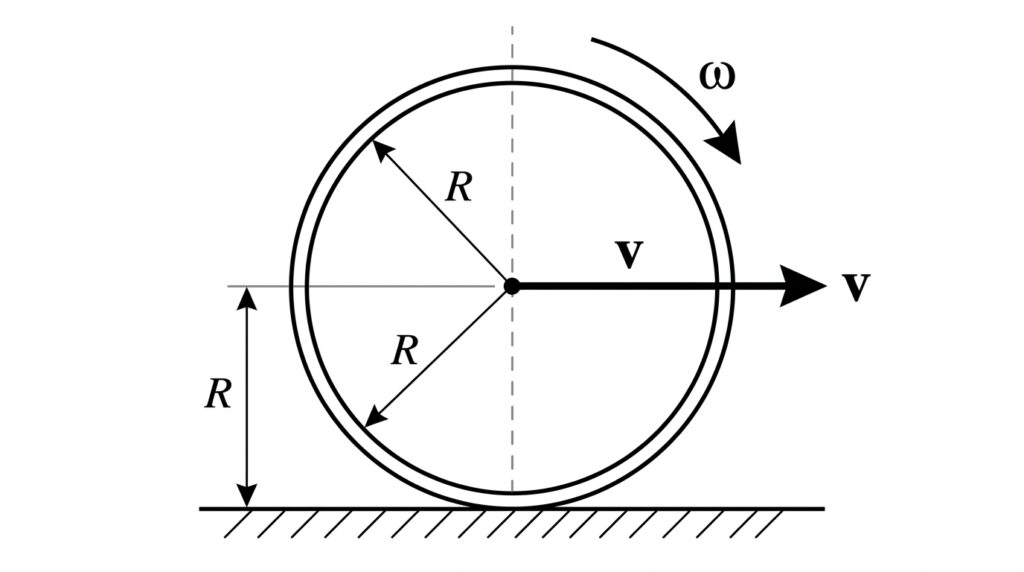
Consider a uniform hoop of radius R and mass M rolling without slipping. Which is larger, its translational kinetic energy or its rotational kinetic energy?



