
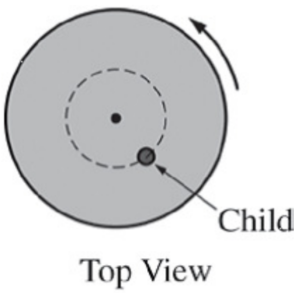
The diagram above shows a top view of a child of mass \(M\) on a circular platform of mass \(2M\) that is rotating counterclockwise. Assume the platform rotates without friction. Which of the following describes an action by the child that will increase the angular speed of the platform-child system and gives the correct reason why?

Two spheres of equal size and equal mass are rotated with an equal amount of torque. One of the spheres is solid with its mass evenly distributed throughout its volume, and the other is hollow with all of its mass concentrated at the edges. Which sphere would rotate faster if the same amount of torque is applied for the same period of time for both?

The graph above shows the angular velocity of a spinning wheel (radius = \( 25 \) \( \text{cm} \)) as a function of time.



