
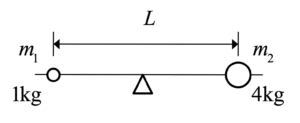
A \( 4 \)-\( \text{kg} \) ball and a \( 1 \)-\( \text{kg} \) ball are positioned a distance \( L \) apart on a bar of negligible mass. How far from the \( 4 \)-\( \text{kg} \) mass should the fulcrum be placed to balance the bar?
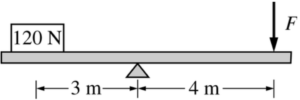
An object weighing 120 N is set on a rigid beam of negligible mass at a distance of 3 m from a pivot, as shown above. A vertical force is to be applied to the other end of the beam a distance of 4 m from the pivot to keep the beam at rest and horizontal. What is the magnitude F of the force required?
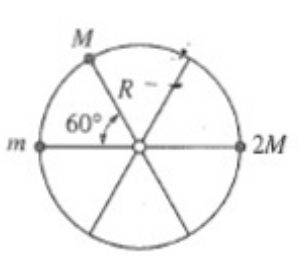
A wheel of radius \( R \) and negligible mass is mounted on a horizontal frictionless axle so that the wheel is in a vertical plane. Three small objects having masses \( m \), \( M \), and \( 2M \), respectively, are mounted on the rim of the wheel, as shown above. If the system is in static equilibrium, what is the value of \( m \) in terms of \( M \)?



