
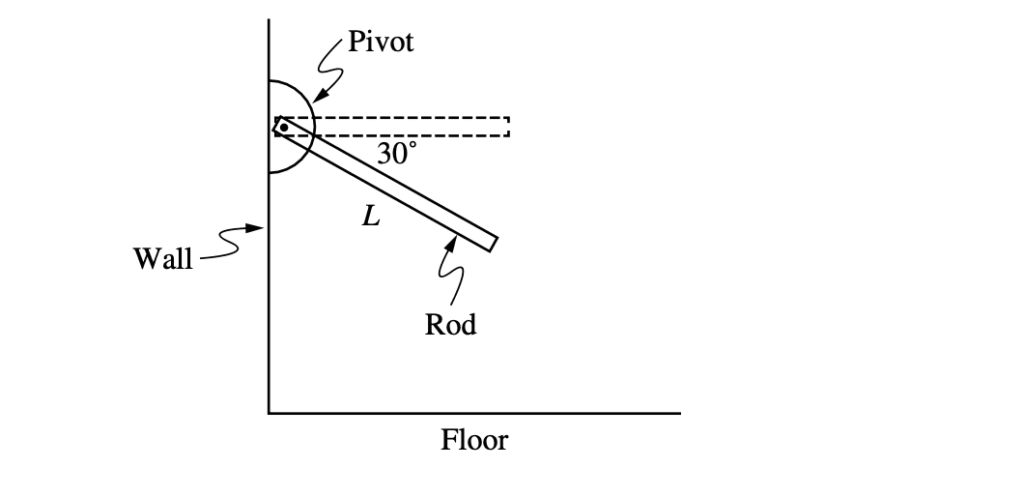
A uniform rod of mass \( M_0 \) and length \( L \) is free to rotate about a pivot at its left end and is released from rest when the rod is \( 30^{\circ} \) below the horizontal, as shown in the figure. With respect to the pivot, the rod has rotational inertia \( I_0 = \dfrac{1}{3} M_0 L^2 \). Which of the following expressions correctly represents the magnitude of the net torque exerted on the rod about the pivot at the moment the rod is released?
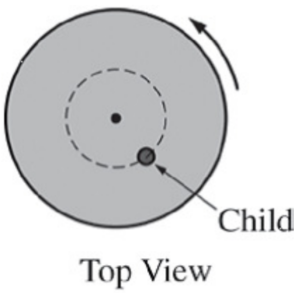
The diagram above shows a top view of a child of mass \(M\) on a circular platform of mass \(2M\) that is rotating counterclockwise. Assume the platform rotates without friction. Which of the following describes an action by the child that will increase the angular speed of the platform-child system and gives the correct reason why?
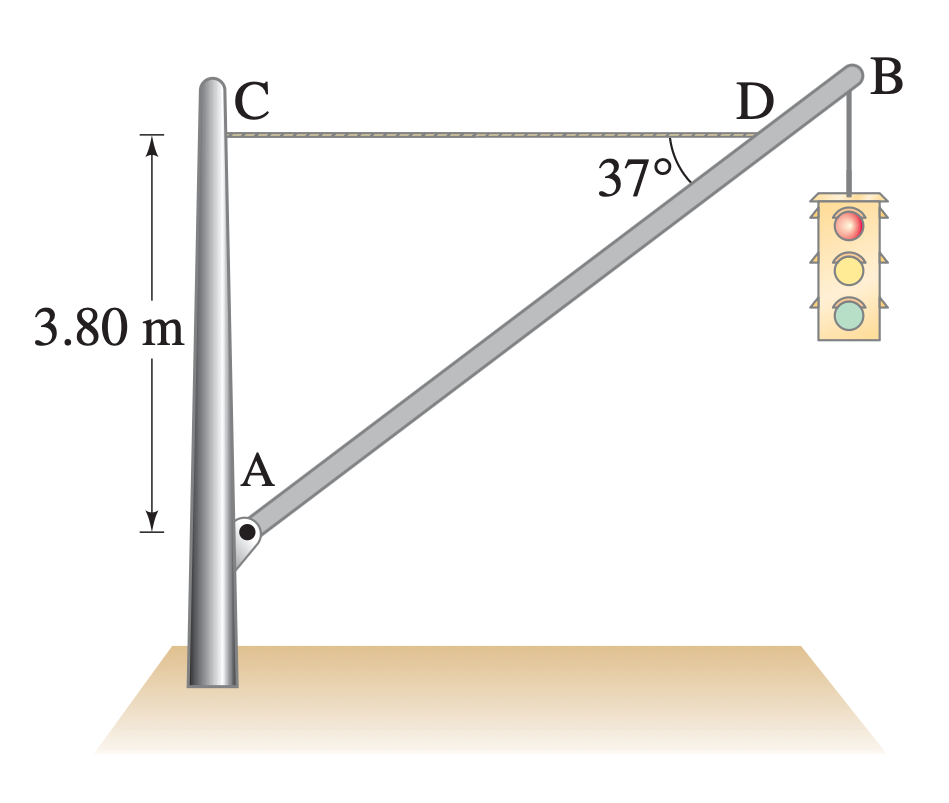
A traffic light hangs from a pole as shown in the diagram. The uniform aluminum pole AB is of length \( 7.20 \) \( \text{m} \) and has a mass of \( 12.0 \) \( \text{kg} \). The mass of the traffic light is \( 21.5 \) \( \text{kg} \). The point C is located \( 3.80 \) \( \text{m} \) vertically above the pivot A. A massless horizontal cable CD is attached at C and connects to the pole at point D, where the pole makes an angle of \( 37^{\circ} \) with the cable.



