Part (a): Minimum coefficient
| Derivation/Formula | Reasoning |
|---|---|
| \[x_2 = \tfrac{L}{2}\cos\theta,\quad x_1 = d\cos\theta,\quad y_{\text{top}} = L\sin\theta\] | Set geometry: horizontal lever arms to the weights are \( \tfrac{L}{2}\cos\theta \) for the ladder’s center (mass \( m_2 \)) and \( d\cos\theta \) for the person (mass \( m_1 \)); the top contact is at height \( L\sin\theta \). |
| \[N_1(L\sin\theta) – m_2 g\left(\tfrac{L}{2}\cos\theta\right) – m_1 g(d\cos\theta) = 0\] | Torque about the bottom with \( \)counterclockwise positive: wall normal \( N_1 \) gives a positive moment \( N_1(L\sin\theta) \); weights \( m_2 g \) and \( m_1 g \) at offsets \( \tfrac{L}{2}\cos\theta \) and \( d\cos\theta \) give clockwise (negative) moments. |
| \[N_1 = \frac{g\cos\theta\left(\tfrac{m_2 L}{2} + m_1 d\right)}{L\sin\theta}\] | Solve the torque equation algebraically for \( N_1 \). |
| \[f – N_1 = 0\] | Horizontal force balance: the floor friction \( f \) (to the right) balances the wall’s leftward normal \( N_1 \), so \( f = N_1 \). |
| \[N_2 – (m_1 + m_2)g = 0\] | Vertical force balance: the ground normal \( N_2 \) supports the total weight \( (m_1+m_2)g \). |
| \[f = \mu_{\min} N_2\] | Impending slip condition at the threshold of motion defines \( \mu_{\min} \) via \( f = \mu_{\min} N_2 \). With \( f = N_1 \), one has \( \mu_{\min} = \tfrac{N_1}{N_2} \). |
| \[\mu_{\min} = \frac{\left(\tfrac{m_2 L}{2} + m_1 d\right)\cos\theta}{(m_1+m_2)L\sin\theta}\] | Substitute \( N_1 = \tfrac{g\cos\theta\left(\tfrac{m_2 L}{2} + m_1 d\right)}{L\sin\theta} \) and \( N_2 = (m_1+m_2)g \); the \( g \) cancels, yielding the simplified ratio. |
| \[\boxed{\mu_{\min} = \frac{\left(\tfrac{m_2 L}{2} + m_1 d\right)\cos\theta}{(m_1+m_2)L\sin\theta}}\] | Final expression for the minimum coefficient ensuring no slip. |
Part (b): Friction magnitude
| Derivation/Formula | Reasoning |
|---|---|
| \[\mu_s = \tfrac{3}{2}\,\mu_{\min}\] | Given that the available static friction coefficient \( \mu_s \) exceeds the minimum \( \mu_{\min} \) by a factor of \( \tfrac{3}{2} \). |
| \[f = N_1\] | In static equilibrium, the actual friction adjusts to balance horizontal forces; thus \( f \) equals the wall normal \( N_1 \), not \( \mu_s N_2 \) unless at the threshold. |
| \[N_1 = \frac{g\cos\theta\left(\tfrac{m_2 L}{2} + m_1 d\right)}{L\sin\theta}\] | Use the same torque result from part (a); it does not depend on \( \mu_s \). |
| \[\boxed{f = \frac{g\cos\theta\left(\tfrac{m_2 L}{2} + m_1 d\right)}{L\sin\theta}}\] | Substitute to obtain the friction magnitude; since \( \mu_s > \mu_{\min} \), this satisfies \( f \le \mu_s N_2 \) with margin. |
A Major Upgrade To Phy Is Coming Soon — Stay Tuned

We'll help clarify entire units in one hour or less — guaranteed.
A self paced course with videos, problems sets, and everything you need to get a 5. Trusted by over 15k students and over 200 schools.
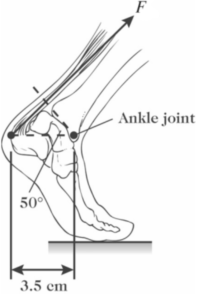
The figure shows a person’s foot. In that figure, the Achilles tendon exerts a force of magnitude F = 720 N. What is the magnitude of the torque that this force produces about the ankle joint?
The downward motion of an elevator is controlled by a cable that unwinds from a cylinder of radius \( 0.20 \) \( \text{m} \). What is the angular velocity of the cylinder when the downward speed of the elevator is \( 1.2 \) \( \text{m/s} \)?
The moment of inertia of a solid cylinder about its axis is given by \( I = \frac{1}{2}mR^2 \). If this cylinder rolls without slipping, the ratio of its rotational kinetic energy to its translational kinetic energy is
A child of mass \( 3 \) \( \text{kg} \) rotates on a platform of \( 10 \) \( \text{kg} \). They start walking towards the center while the platform is rotating. Which of the following could possibly decrease the total angular momentum of the child-platform system?
A uniform copper disk of radius \( R \) has a moment of inertia \( I \) around an axis passing through the center of the disk perpendicular to its plane. If the radius of the disk were only \( \dfrac{R}{2} \), but the thickness were the same, what would be the moment of inertia in terms of \( I \)? Hint: The moment of inertia of a solid disk about its center is \(\frac{1}{2} M R^{2}\).
A 6.0-cm-diameter gear rotates with angular velocity \( \omega = \left(20-\frac {1}{2} t^2 \right) \, \text {rad/s} \), where \(t\) is in seconds. At \(t = 4.0 \, \text{s}\), what are
The driver of a car traveling at \( 30.0 \) \( \text{m/s} \) applies the brakes and undergoes a constant negative acceleration of \( 2.00 \) \( \text{m/s}^2 \). How many revolutions does each tire make before the car comes to a stop, assuming that the car does not skid and that the tires have radii of \( 0.300 \) \( \text{m} \)?
A uniform stick has length \( L \). The moment of inertia about the center of the stick is \( I_0 \). A particle of mass \( M \) is attached to one end of the stick. The moment of inertia of the combined system about the center of the stick is
While traveling in its elliptical orbit around the Sun, Mars gains speed during the part of the orbit where it is getting closer to the Sun. Which of the following can be used to explain this gain in speed?
\(\mu_{\min} = \frac{\left(\tfrac{m_2 L}{2} + m_1 d\right)\cos\theta}{(m_1+m_2)L\sin\theta}\)
\(f = \frac{g\cos\theta\left(\tfrac{m_2 L}{2} + m_1 d\right)}{L\sin\theta}\)
By continuing you (1) agree to our Terms of Use and Terms of Sale and (2) consent to sharing your IP and browser information used by this site’s security protocols as outlined in our Privacy Policy.
| Kinematics | Forces |
|---|---|
| \(\Delta x = v_i t + \frac{1}{2} at^2\) | \(F = ma\) |
| \(v = v_i + at\) | \(F_g = \frac{G m_1 m_2}{r^2}\) |
| \(v^2 = v_i^2 + 2a \Delta x\) | \(f = \mu N\) |
| \(\Delta x = \frac{v_i + v}{2} t\) | \(F_s =-kx\) |
| \(v^2 = v_f^2 \,-\, 2a \Delta x\) |
| Circular Motion | Energy |
|---|---|
| \(F_c = \frac{mv^2}{r}\) | \(KE = \frac{1}{2} mv^2\) |
| \(a_c = \frac{v^2}{r}\) | \(PE = mgh\) |
| \(T = 2\pi \sqrt{\frac{r}{g}}\) | \(KE_i + PE_i = KE_f + PE_f\) |
| \(W = Fd \cos\theta\) |
| Momentum | Torque and Rotations |
|---|---|
| \(p = mv\) | \(\tau = r \cdot F \cdot \sin(\theta)\) |
| \(J = \Delta p\) | \(I = \sum mr^2\) |
| \(p_i = p_f\) | \(L = I \cdot \omega\) |
| Simple Harmonic Motion | Fluids |
|---|---|
| \(F = -kx\) | \(P = \frac{F}{A}\) |
| \(T = 2\pi \sqrt{\frac{l}{g}}\) | \(P_{\text{total}} = P_{\text{atm}} + \rho gh\) |
| \(T = 2\pi \sqrt{\frac{m}{k}}\) | \(Q = Av\) |
| \(x(t) = A \cos(\omega t + \phi)\) | \(F_b = \rho V g\) |
| \(a = -\omega^2 x\) | \(A_1v_1 = A_2v_2\) |
| Constant | Description |
|---|---|
| [katex]g[/katex] | Acceleration due to gravity, typically [katex]9.8 , \text{m/s}^2[/katex] on Earth’s surface |
| [katex]G[/katex] | Universal Gravitational Constant, [katex]6.674 \times 10^{-11} , \text{N} \cdot \text{m}^2/\text{kg}^2[/katex] |
| [katex]\mu_k[/katex] and [katex]\mu_s[/katex] | Coefficients of kinetic ([katex]\mu_k[/katex]) and static ([katex]\mu_s[/katex]) friction, dimensionless. Static friction ([katex]\mu_s[/katex]) is usually greater than kinetic friction ([katex]\mu_k[/katex]) as it resists the start of motion. |
| [katex]k[/katex] | Spring constant, in [katex]\text{N/m}[/katex] |
| [katex] M_E = 5.972 \times 10^{24} , \text{kg} [/katex] | Mass of the Earth |
| [katex] M_M = 7.348 \times 10^{22} , \text{kg} [/katex] | Mass of the Moon |
| [katex] M_M = 1.989 \times 10^{30} , \text{kg} [/katex] | Mass of the Sun |
| Variable | SI Unit |
|---|---|
| [katex]s[/katex] (Displacement) | [katex]\text{meters (m)}[/katex] |
| [katex]v[/katex] (Velocity) | [katex]\text{meters per second (m/s)}[/katex] |
| [katex]a[/katex] (Acceleration) | [katex]\text{meters per second squared (m/s}^2\text{)}[/katex] |
| [katex]t[/katex] (Time) | [katex]\text{seconds (s)}[/katex] |
| [katex]m[/katex] (Mass) | [katex]\text{kilograms (kg)}[/katex] |
| Variable | Derived SI Unit |
|---|---|
| [katex]F[/katex] (Force) | [katex]\text{newtons (N)}[/katex] |
| [katex]E[/katex], [katex]PE[/katex], [katex]KE[/katex] (Energy, Potential Energy, Kinetic Energy) | [katex]\text{joules (J)}[/katex] |
| [katex]P[/katex] (Power) | [katex]\text{watts (W)}[/katex] |
| [katex]p[/katex] (Momentum) | [katex]\text{kilogram meters per second (kgm/s)}[/katex] |
| [katex]\omega[/katex] (Angular Velocity) | [katex]\text{radians per second (rad/s)}[/katex] |
| [katex]\tau[/katex] (Torque) | [katex]\text{newton meters (Nm)}[/katex] |
| [katex]I[/katex] (Moment of Inertia) | [katex]\text{kilogram meter squared (kgm}^2\text{)}[/katex] |
| [katex]f[/katex] (Frequency) | [katex]\text{hertz (Hz)}[/katex] |
Metric Prefixes
Example of using unit analysis: Convert 5 kilometers to millimeters.
Start with the given measurement: [katex]\text{5 km}[/katex]
Use the conversion factors for kilometers to meters and meters to millimeters: [katex]\text{5 km} \times \frac{10^3 \, \text{m}}{1 \, \text{km}} \times \frac{10^3 \, \text{mm}}{1 \, \text{m}}[/katex]
Perform the multiplication: [katex]\text{5 km} \times \frac{10^3 \, \text{m}}{1 \, \text{km}} \times \frac{10^3 \, \text{mm}}{1 \, \text{m}} = 5 \times 10^3 \times 10^3 \, \text{mm}[/katex]
Simplify to get the final answer: [katex]\boxed{5 \times 10^6 \, \text{mm}}[/katex]
Prefix | Symbol | Power of Ten | Equivalent |
|---|---|---|---|
Pico- | p | [katex]10^{-12}[/katex] | 0.000000000001 |
Nano- | n | [katex]10^{-9}[/katex] | 0.000000001 |
Micro- | µ | [katex]10^{-6}[/katex] | 0.000001 |
Milli- | m | [katex]10^{-3}[/katex] | 0.001 |
Centi- | c | [katex]10^{-2}[/katex] | 0.01 |
Deci- | d | [katex]10^{-1}[/katex] | 0.1 |
(Base unit) | – | [katex]10^{0}[/katex] | 1 |
Deca- or Deka- | da | [katex]10^{1}[/katex] | 10 |
Hecto- | h | [katex]10^{2}[/katex] | 100 |
Kilo- | k | [katex]10^{3}[/katex] | 1,000 |
Mega- | M | [katex]10^{6}[/katex] | 1,000,000 |
Giga- | G | [katex]10^{9}[/katex] | 1,000,000,000 |
Tera- | T | [katex]10^{12}[/katex] | 1,000,000,000,000 |
One price to unlock most advanced version of Phy across all our tools.
per month
Billed Monthly. Cancel Anytime.
Try our free calculator to see what you need to get a 5 on the 2026 AP Physics 1 exam.
A quick explanation
Credits are used to grade your FRQs and GQs. Pro users get unlimited credits.
Submitting counts as 1 attempt.
Viewing answers or explanations count as a failed attempts.
Phy gives partial credit if needed
MCQs and GQs are are 1 point each. FRQs will state points for each part.
Phy customizes problem explanations based on what you struggle with. Just hit the explanation button to see.
Understand you mistakes quicker.

Phy automatically provides feedback so you can improve your responses.
10 Free Credits To Get You Started

By continuing you agree to nerd-notes.com Terms of Service, Privacy Policy, and our usage of user data.
Feeling uneasy about your next physics test? We'll boost your grade in 3 lessons or less—guaranteed

NEW! PHY AI accurately solves all questions
🔥 Get up to 30% off Elite Physics Tutoring
🧠 NEW! Learn Physics From Scratch Self Paced Course
🎯 Need exam style practice questions?
