
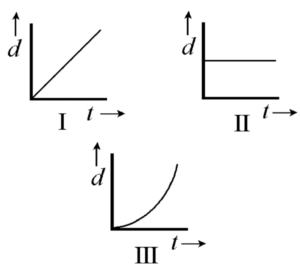
In which of the following is the rate of change of the particle’s momentum zero?
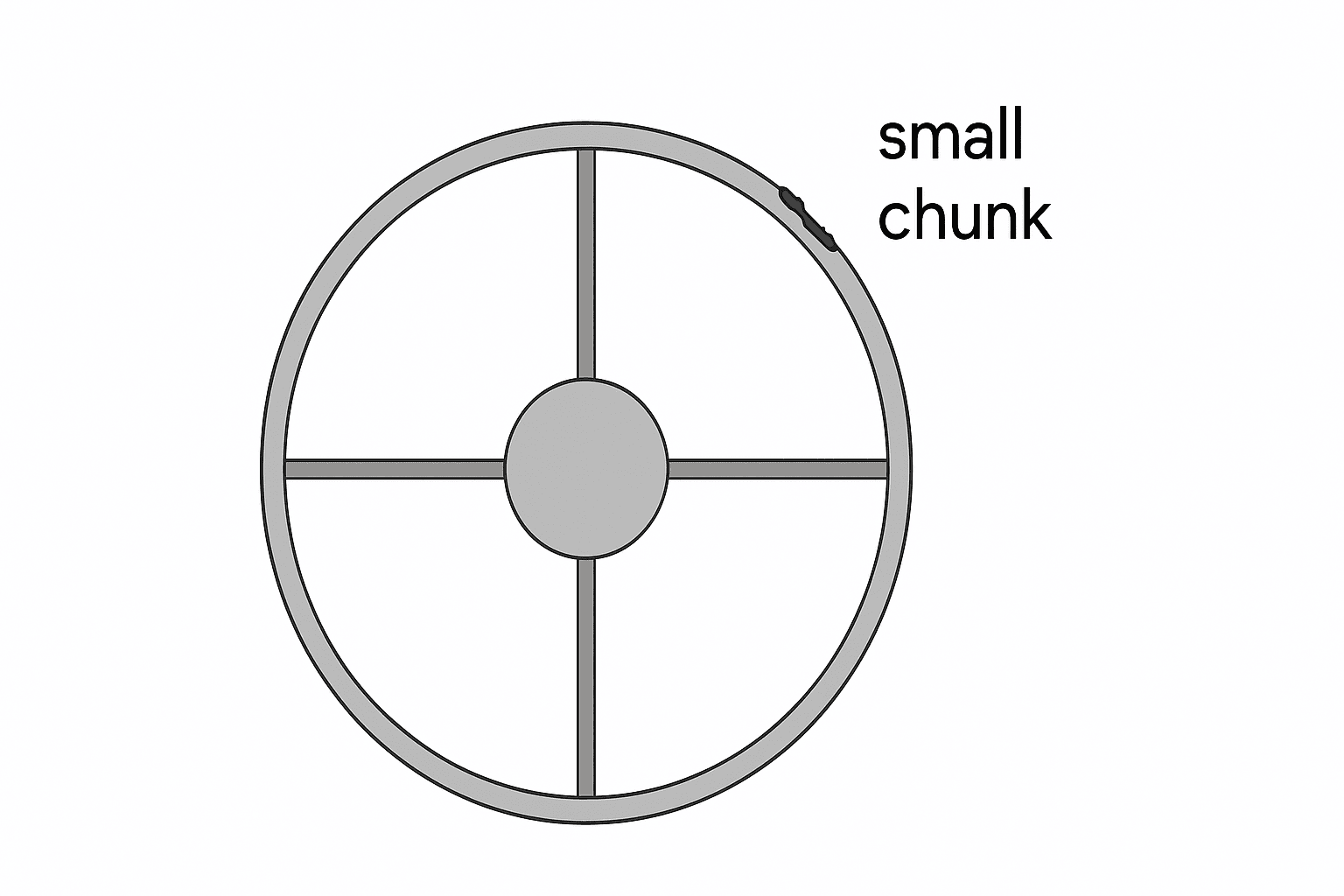
The object shown in the diagram below consists of a cylinder of mass \( 100 \) \( \text{kg} \) and radius \( 25.0 \) \( \text{cm} \) connected by four thin rods, each of mass \( 5.00 \) \( \text{kg} \) and length \( 0.75 \) \( \text{m} \), to a thin-outer ring of mass \( 20.0 \) \( \text{kg} \). A small chunk of metal of mass \( 1.00 \) \( \text{kg} \) is welded to the outer ring. Determine the moment of inertia of the entire assembly about the center of the inner cylinder, treating the metal chunk as a point mass. Hint: The moment of inertia of a disk about it center is \(\tfrac{1}{2} M R^2\), a thin rod about it center is \(\tfrac{1}{12}ML^2\), and a thin hoop about its center is \(I = MR^2\).
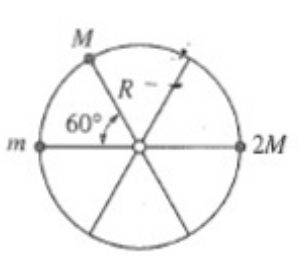
A wheel of radius \( R \) and negligible mass is mounted on a horizontal frictionless axle so that the wheel is in a vertical plane. Three small objects having masses \( m \), \( M \), and \( 2M \), respectively, are mounted on the rim of the wheel, as shown above. If the system is in static equilibrium, what is the value of \( m \) in terms of \( M \)?

A uniform, rigid rod of length \( 2 \) \( \text{m} \) lies on a horizontal surface. One end of the rod can pivot about an axis that is perpendicular to the rod and along the plane of the page. A \( 10 \) \( \text{N} \) force is applied to the rod at its midpoint at an angle of \( 37^{\circ} \). A second force \( F \) is applied to the free end of the rod so that the rod remains at rest, as shown in the figure. The magnitude of the torque produced by force \( F \) is most nearly
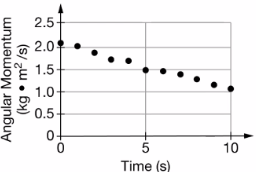
During the experiment, students collect data about the angular momentum of a rigid, uniform spinning wheel about an axle as a function of time, which was used to create the graph that is shown. A frictional torque is exerted on the wheel. A student makes the following statement about the data. “The frictional torque exerted on the wheel is independent of the wheel’s angular speed.” Does the data from the graph support the student’s statement? Justify your selection.



