
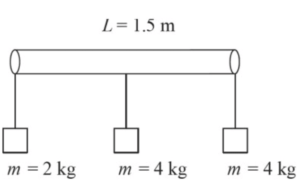
Three masses are attached to a \( 1.5 \, \text{m} \) long massless bar. Mass 1 is \( 2 \, \text{kg} \) and is attached to the far left side of the bar. Mass 2 is \( 4 \, \text{kg} \) and is attached to the far right side of the bar. Mass 3 is \( 4 \, \text{kg} \) and is attached to the middle of the bar. At what distance from the far left side of the bar can a string be attached to hold the bar up horizontally?
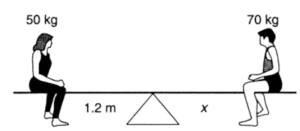
A \( 50 \, \text{kg} \) person is sitting on a seesaw \( 1.2 \, \text{m} \) from the balance point. On the other side, a \( 70 \, \text{kg} \) person is balanced. How far from the balance point is the second person sitting?
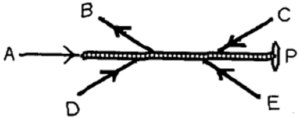
Five forces act on a rod that is free to pivot at point \( P \), as shown in the figure. Which of these forces is producing a counter-clockwise torque about point \( P \)?

Two spheres of equal size and equal mass are rotated with an equal amount of torque. One of the spheres is solid with its mass evenly distributed throughout its volume, and the other is hollow with all of its mass concentrated at the edges. Which sphere would rotate faster if the same amount of torque is applied for the same period of time for both?
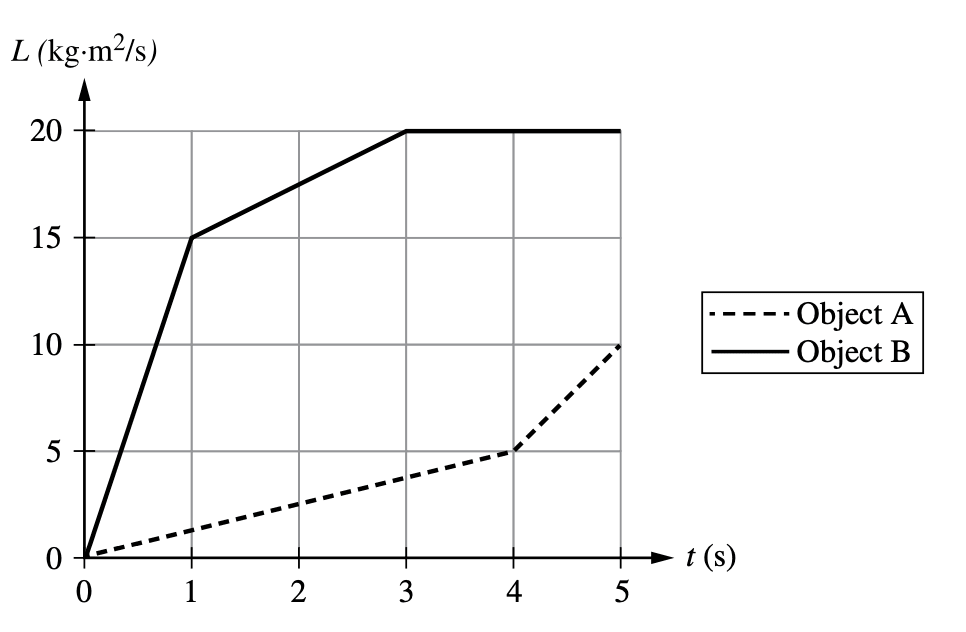
Two disks, A and B, each experience a net external torque that varies over an interval of \( 5 \) \( \text{s} \). Disk B has a rotational inertia that is twice that of Disk A. The graph shown represents the angular momentum of the two disks as functions of time between \( t = 0 \) \( \text{s} \) and \( t = 5 \) \( \text{s} \). The average magnitudes of the net torques exerted on disks A and B from \( t = 0 \) \( \text{s} \) to \( t = 5 \) \( \text{s} \) are \( \tau_A \) and \( \tau_B \), respectively. Which of the following expressions correctly relates the magnitudes of the average torques?



