
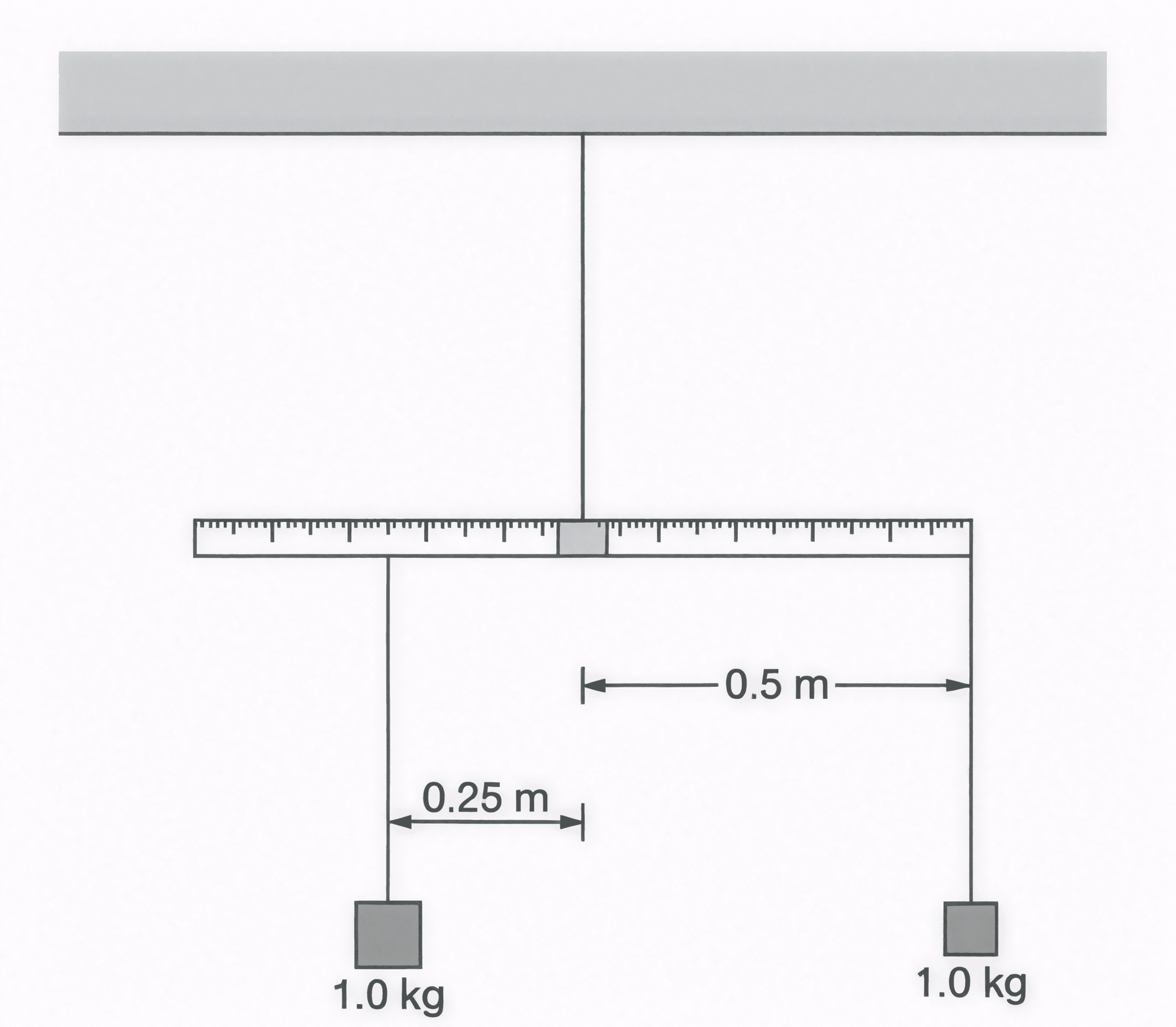
A meterstick is supported at its center, which is aligned with the center of a cradle located at position \( x = 0 \) \( \text{m} \). Two identical objects of mass \( 1.0 \) \( \text{kg} \) are suspended from the meterstick. One object hangs \( 0.25 \) \( \text{m} \) to the left of the support point, and the other object hangs \( 0.50 \) \( \text{m} \) to the right of the support point. The system is released from rest and is free to rotate. Which of the following claims correctly describes the subsequent motion of the system containing the meterstick, cradle, and the two objects?
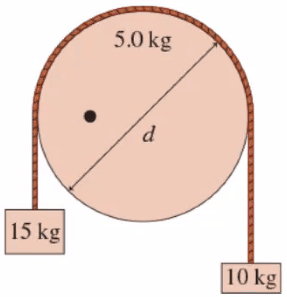
The axle (the black dot) in Figure 1 is half the distance from the center to the rim. Suppose \( d = 30 \) \( \text{cm} \). What is the torque that the axle must apply to prevent the disk from rotating? Express your answer in newton-meters. Use positive value for the counterclockwise torque and negative value for the clockwise torque.

What is the net torque acting on the pivot supporting a \(10 \, \text{kilogram}\) beam \(2 \, \text{meters}\) long as shown above? Assume that the positive direction is clockwise.

Two spheres of equal size and equal mass are rotated with an equal amount of torque. One of the spheres is solid with its mass evenly distributed throughout its volume, and the other is hollow with all of its mass concentrated at the edges. Which sphere would rotate faster if the same amount of torque is applied for the same period of time for both?
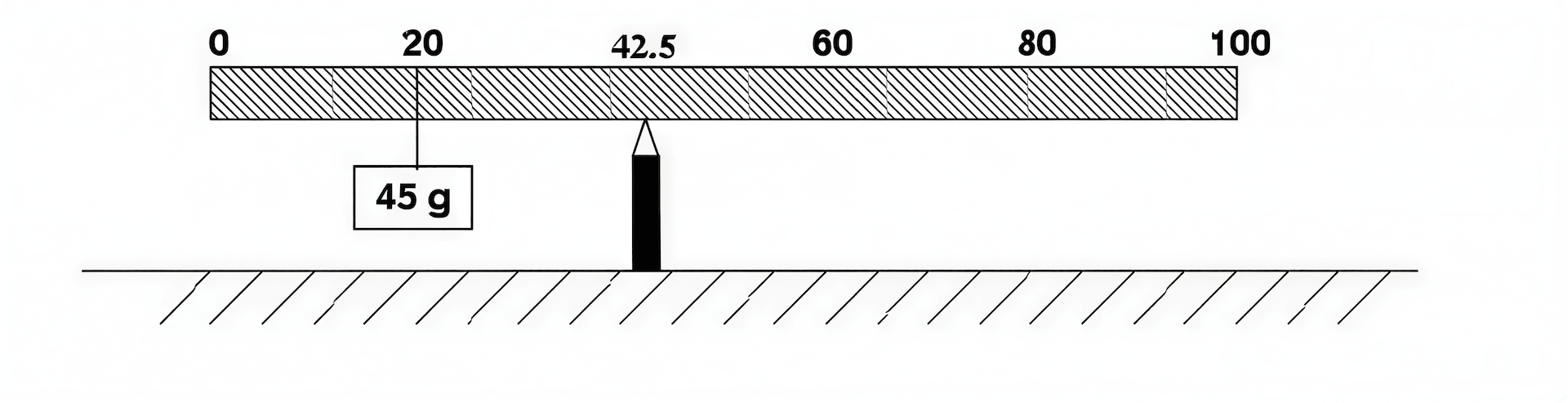
A uniform meter stick has a mass of \( 45.0 \) \( \text{g} \) placed at the \( 20 \) \( \text{cm} \) mark. If a pivot is placed at the \( 42.5 \) \( \text{cm} \) mark and the meter stick remains horizontal in static equilibrium, what is the mass of the meter stick?
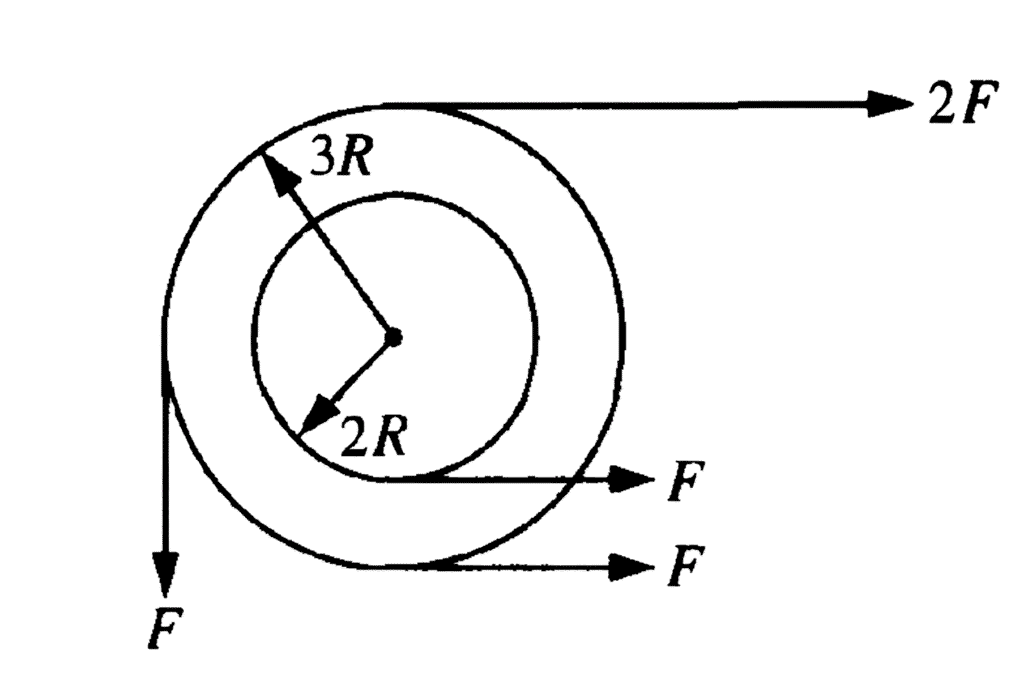
A system of two wheels fixed to each other is free to rotate about a frictionless axis through the common center of the wheels and perpendicular to the page. Four forces are exerted tangentially to the rims of the wheels, as shown in the figure. The magnitude of the net torque on the system about the axis is



