

A massless rigid rod of length \(3d\) is pivoted at a fixed point \(W\), and two forces each of magnitude \(F\) are applied vertically upward as shown above. A third vertical force of magnitude \(F\) may be applied, either upward or downward, at one of the labeled points. With the proper choice of direction at each point, the rod can be in equilibrium if the third force of magnitude \(F\) is applied at point?
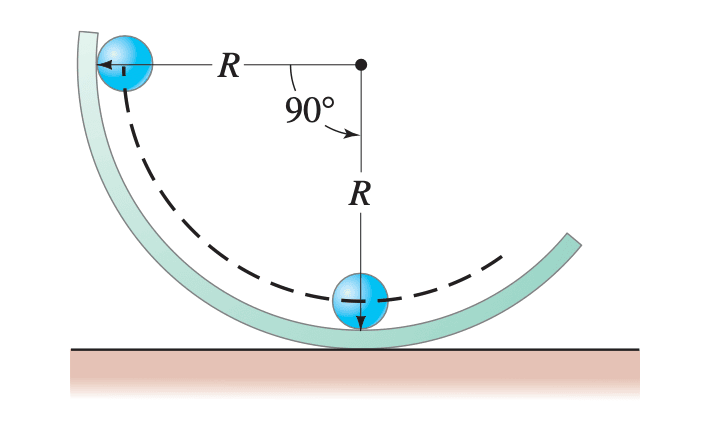
A ball of radius \( r \) rolls on the inside of a circular track of radius \( R \). If the ball starts from rest at the left vertical edge of the track, what will be its speed when it reaches the lowest point of the track, rolling without slipping? For a solid spherical ball, the moment of inertia is \(\frac{2}{5} m r^2\).
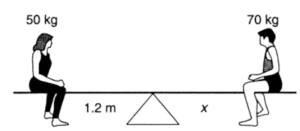
A \( 50 \, \text{kg} \) person is sitting on a seesaw \( 1.2 \, \text{m} \) from the balance point. On the other side, a \( 70 \, \text{kg} \) person is balanced. How far from the balance point is the second person sitting?
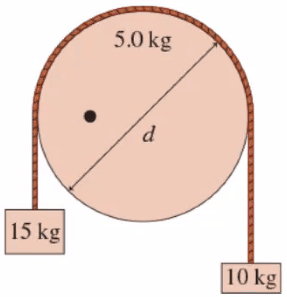
The axle (the black dot) in Figure 1 is half the distance from the center to the rim. Suppose \( d = 30 \) \( \text{cm} \). What is the torque that the axle must apply to prevent the disk from rotating? Express your answer in newton-meters. Use positive value for the counterclockwise torque and negative value for the clockwise torque.
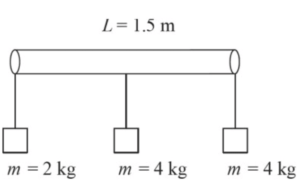
Three masses are attached to a \( 1.5 \, \text{m} \) long massless bar. Mass 1 is \( 2 \, \text{kg} \) and is attached to the far left side of the bar. Mass 2 is \( 4 \, \text{kg} \) and is attached to the far right side of the bar. Mass 3 is \( 4 \, \text{kg} \) and is attached to the middle of the bar. At what distance from the far left side of the bar can a string be attached to hold the bar up horizontally?



