| Step |
Derivation/Formula |
Reasoning |
| 1 |
\[\Delta L = \tau_{\text{net}}\,\Delta t\] |
The change in angular momentum about the pivot equals the angular impulse. This is the most direct way to get \(\Delta L\) after \(1\,\text{s}\) without needing \(\omega\) or \(I\). |
| 2 |
\[\tau_{\text{net}} = \sum \tau_i = \sum \left(r_i F_i\right)\] |
Net torque about the pivot is the sum of torques from all weights (gravity forces) acting at their lever arms \(r_i\). The pivot force produces zero torque about the pivot. |
| 3 |
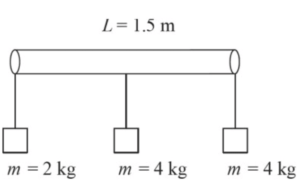
\[r_A = 0-0.25 = -0.25\,\text{m},\quad m_A=1.0\,\text{kg}\] |
Object \(A\) is at the left end (\(0\,\text{m}\)). Its position relative to the pivot at \(0.25\,\text{m}\) is \(-0.25\,\text{m}\) (left of pivot). |
| 4 |
\[r_B = 0.50-0.25 = +0.25\,\text{m},\quad m_B=0.50\,\text{kg}\] |
Object \(B\) is at \(0.50\,\text{m}\), which is \(+0.25\,\text{m}\) (right of pivot). |
| 5 |
\[r_{\text{stick}} = 0.50-0.25 = +0.25\,\text{m},\quad m_{\text{stick}}=0.50\,\text{kg}\] |
The meter stick is uniform, so its weight acts at its center of mass at \(0.50\,\text{m}\), giving the same lever arm \(+0.25\,\text{m}\). |
| 6 |
\[\tau_{\text{net}} = g\left(m_A r_A + m_B r_B + m_{\text{stick}} r_{\text{stick}}\right)\] |
Each torque from a weight equals \(\tau_i = r_i (m_i g)\), with sign set by whether it tends to rotate clockwise or counterclockwise about the pivot. |
| 7 |
\[\tau_{\text{net}} = g\left[(1.0)(-0.25) + (0.50)(+0.25) + (0.50)(+0.25)\right]\] |
Substitute the masses and lever arms. The two right-side contributions are positive and the left-side contribution is negative. |
| 8 |
\[\tau_{\text{net}} = g\left[-0.25 + 0.125 + 0.125\right] = g(0)=0\] |
The torques exactly balance initially, so the net external torque about the pivot is zero. |
| 9 |
\[\Delta L = \tau_{\text{net}}\Delta t = (0)(1\,\text{s}) = 0\] |
With zero net torque, angular impulse is zero, so angular momentum about the pivot does not change after \(1\,\text{s}\) (it remains whatever it started as, which is also zero because it was released from rest). |
| 10 |
\[\boxed{\Delta L = 0\,\text{kg}\cdot\text{m}^2/\text{s}}\] |
Final result for the change in angular momentum of the meter stick about the pivot after one second. |
| 11 |
\[\text{Correct choice: (a)}\] |
(b) and (c) are nonzero and would require a nonzero net torque. (d) is incorrect because the net torque (and thus \(\Delta L\)) is determinable directly from given masses and lever arms. |