
 The figure above shows a uniform beam of length \( L \) and mass \( M \) that hangs horizontally and is attached to a vertical wall. A block of mass \( M \) is suspended from the far end of the beam by a cable. A support cable runs from the wall to the outer edge of the beam. Both cables are of negligible mass. The wall exerts a force \( F_w \) on the left end of the beam. For which of the following actions is the magnitude of the vertical component of \( F_w \) smallest?
The figure above shows a uniform beam of length \( L \) and mass \( M \) that hangs horizontally and is attached to a vertical wall. A block of mass \( M \) is suspended from the far end of the beam by a cable. A support cable runs from the wall to the outer edge of the beam. Both cables are of negligible mass. The wall exerts a force \( F_w \) on the left end of the beam. For which of the following actions is the magnitude of the vertical component of \( F_w \) smallest?
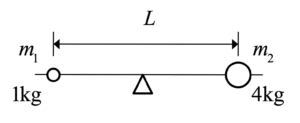
A \( 4 \)-\( \text{kg} \) ball and a \( 1 \)-\( \text{kg} \) ball are positioned a distance \( L \) apart on a bar of negligible mass. How far from the \( 4 \)-\( \text{kg} \) mass should the fulcrum be placed to balance the bar?
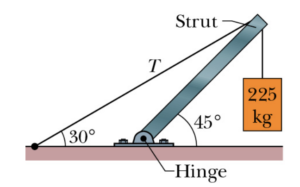
The system in the Figure is in equilibrium. A concrete block of mass \(225 \, \text{kg}\) hangs from the end of a uniform strut whose mass is \(45.0 \, \text{kg}\).

A uniform, rigid rod of length \( 2 \) \( \text{m} \) lies on a horizontal surface. One end of the rod can pivot about an axis that is perpendicular to the rod and along the plane of the page. A \( 10 \) \( \text{N} \) force is applied to the rod at its midpoint at an angle of \( 37^{\circ} \). A second force \( F \) is applied to the free end of the rod so that the rod remains at rest, as shown in the figure. The magnitude of the torque produced by force \( F \) is most nearly



