| Derivation or Formula | Reasoning |
|---|---|
| \[\text{Given points: }A=(0,0),\;F_1\text{ at }(0,-2),\;F_2\text{ at }(2,-2),\;F_3\text{ at }(3,-1)\] | Set the pivot at \(A\) and list each force’s application point. |
| \[\text{Let each force magnitude be }F\] | All three forces have equal magnitude \(F\). |
| \[\text{Use }\tau_z = r_x F_y – r_y F_x\] | In 2D, the torque about the pivot (out of page \(z\)-component) is given by \(\tau_z\). Positive corresponds to counterclockwise (CCW). |
| \[\vec r_1=(0,-2)-(0,0)=(0,-2)\] | Position vector from \(A\) to where \(F_1\) acts. |
| \[\vec F_1=\left(-\frac{F}{\sqrt2},-\frac{F}{\sqrt2}\right)\] | “SW at \(45^\circ\) to vertical” means left and down with equal components: \(F_x<0,\;F_y<0\), each of magnitude \(F/\sqrt2\). |
| \[\tau_{1A}=r_{1x}F_{1y}-r_{1y}F_{1x}=(0)\left(-\frac{F}{\sqrt2}\right)-(-2)\left(-\frac{F}{\sqrt2}\right)=-\frac{2F}{\sqrt2}=-\sqrt2F\] | Compute torque from \(F_1\) about \(A\). Negative means clockwise (CW). |
| \[\vec r_2=(2,-2)-(0,0)=(2,-2)\] | Position vector from \(A\) to where \(F_2\) acts. |
| \[\vec F_2=\left(-\frac{F}{\sqrt2},\frac{F}{\sqrt2}\right)\] | “NW at \(45^\circ\) to vertical” means left and up with equal components: \(F_x0\). |
| \[\tau_{2A}=r_{2x}F_{2y}-r_{2y}F_{2x}=2\left(\frac{F}{\sqrt2}\right)-(-2)\left(-\frac{F}{\sqrt2}\right)=\frac{2F}{\sqrt2}-\frac{2F}{\sqrt2}=0\] | Torque from \(F_2\) cancels because the moment from its vertical component is canceled by the moment from its horizontal component about \(A\). |
| \[\vec r_3=(3,-1)-(0,0)=(3,-1)\] | Position vector from \(A\) to where \(F_3\) acts. |
| \[\vec F_3=(F,0)\] | \(F_3\) acts horizontally east: \(F_x=F,\;F_y=0\). |
| \[\tau_{3A}=r_{3x}F_{3y}-r_{3y}F_{3x}=3(0)-(-1)(F)=F\] | The line of action is above/below pivot by \(1\,\text{m}\) (since \(r_y=-1\)), producing a CCW (positive) torque. |
| \[\tau_{\text{net},A}=\tau_{1A}+\tau_{2A}+\tau_{3A}=-\sqrt2F+0+F=(1-\sqrt2)F\] | Sum the three torques about \(A\). |
| \[\boxed{\tau_{\text{net},A}=(1-\sqrt2)F\;\text{Nm}\;<0\;\Rightarrow\;\text{CW}}\] | Since \(\sqrt2\approx1.414\), \((1-\sqrt2)F<0\), so the net torque about \(A\) is clockwise. |
| Derivation or Formula | Reasoning |
|---|---|
| \[B=(0,-1)\] | Set the pivot at \(B\). |
| \[\tau_z = r_x F_y – r_y F_x\] | Same torque relation about the new pivot. |
| \[\vec r_1=(0,-2)-(0,-1)=(0,-1)\] | Position vector from \(B\) to where \(F_1\) acts. |
| \[\vec F_1=\left(-\frac{F}{\sqrt2},-\frac{F}{\sqrt2}\right)\] | Same force components as before. |
| \[\tau_{1B}=0\left(-\frac{F}{\sqrt2}\right)-(-1)\left(-\frac{F}{\sqrt2}\right)=-\frac{F}{\sqrt2}\] | Torque from \(F_1\) about \(B\) is negative (CW). |
| \[\vec r_2=(2,-2)-(0,-1)=(2,-1)\] | Position vector from \(B\) to where \(F_2\) acts. |
| \[\vec F_2=\left(-\frac{F}{\sqrt2},\frac{F}{\sqrt2}\right)\] | Same \(F_2\) components as before. |
| \[\tau_{2B}=2\left(\frac{F}{\sqrt2}\right)-(-1)\left(-\frac{F}{\sqrt2}\right)=\frac{2F}{\sqrt2}-\frac{F}{\sqrt2}=\frac{F}{\sqrt2}\] | Net torque from \(F_2\) about \(B\) is positive (CCW). |
| \[\vec r_3=(3,-1)-(0,-1)=(3,0)\] | Position vector from \(B\) to where \(F_3\) acts. |
| \[\vec F_3=(F,0)\] | Same horizontal force. |
| \[\tau_{3B}=3(0)-0(F)=0\] | Since \(\vec r_3\) is purely horizontal and \(\vec F_3\) is also horizontal, the line of action passes through the pivot height, giving zero moment arm about \(B\). |
| \[\tau_{\text{net},B}=\left(-\frac{F}{\sqrt2}\right)+\left(\frac{F}{\sqrt2}\right)+0=0\] | Sum of torques cancels exactly. |
| \[\boxed{\tau_{\text{net},B}=0\;\text{Nm}\;\Rightarrow\;\text{zero}}\] | Equal and opposite torques from \(F_1\) and \(F_2\) cancel, and \(F_3\) produces no torque about \(B\). |
| Derivation or Formula | Reasoning |
|---|---|
| \[C=(1,-1)\] | Set the pivot at \(C\). |
| \[\tau_z = r_x F_y – r_y F_x\] | Same torque formula. |
| \[\vec r_1=(0,-2)-(1,-1)=(-1,-1)\] | Position vector from \(C\) to where \(F_1\) acts. |
| \[\vec F_1=\left(-\frac{F}{\sqrt2},-\frac{F}{\sqrt2}\right)\] | Same \(F_1\) components. |
| \[\tau_{1C}=(-1)\left(-\frac{F}{\sqrt2}\right)-(-1)\left(-\frac{F}{\sqrt2}\right)=\frac{F}{\sqrt2}-\frac{F}{\sqrt2}=0\] | About \(C\), the perpendicular effects of \(F_1\)’s components cancel, giving zero net torque from \(F_1\). |
| \[\vec r_2=(2,-2)-(1,-1)=(1,-1)\] | Position vector from \(C\) to where \(F_2\) acts. |
| \[\vec F_2=\left(-\frac{F}{\sqrt2},\frac{F}{\sqrt2}\right)\] | Same \(F_2\) components. |
| \[\tau_{2C}=1\left(\frac{F}{\sqrt2}\right)-(-1)\left(-\frac{F}{\sqrt2}\right)=\frac{F}{\sqrt2}-\frac{F}{\sqrt2}=0\] | Similarly, \(F_2\)’s component torques cancel about \(C\). |
| \[\vec r_3=(3,-1)-(1,-1)=(2,0)\] | Position vector from \(C\) to where \(F_3\) acts. |
| \[\vec F_3=(F,0)\] | Horizontal eastward force. |
| \[\tau_{3C}=2(0)-0(F)=0\] | \(\vec r_3\) is horizontal and \(\vec F_3\) is horizontal, so there is no moment arm about \(C\). |
| \[\tau_{\text{net},C}=0+0+0=0\] | All three individual torques are zero about \(C\). |
| \[\boxed{\tau_{\text{net},C}=0\;\text{Nm}\;\Rightarrow\;\text{zero}}\] | The lines of action produce no net rotational tendency about \(C\); each force has either zero moment arm or cancels via its components. |
A Major Upgrade To Phy Is Coming Soon — Stay Tuned

We'll help clarify entire units in one hour or less — guaranteed.
A self paced course with videos, problems sets, and everything you need to get a 5. Trusted by over 15k students and over 200 schools.
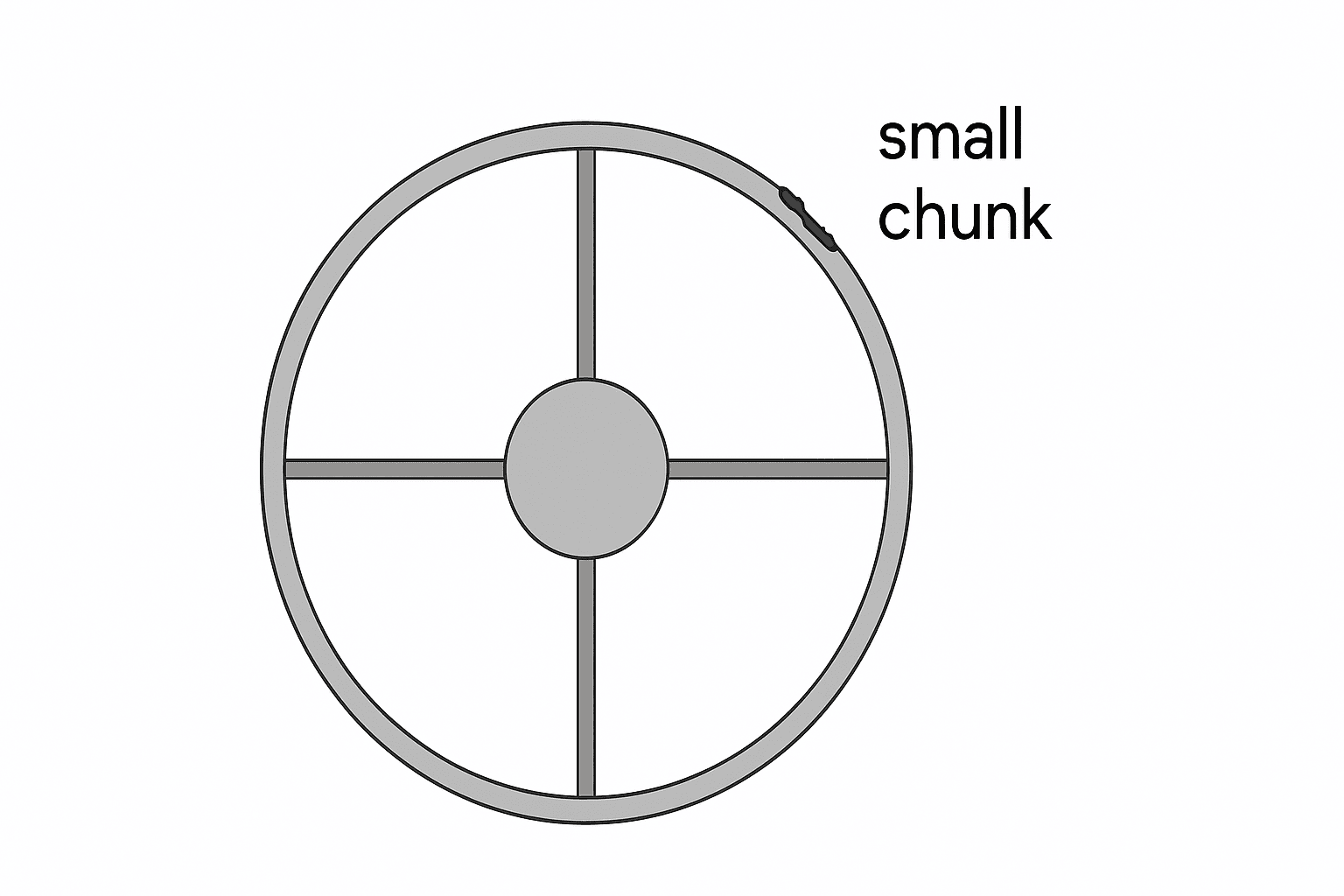
The object shown in the diagram below consists of a cylinder of mass \( 100 \) \( \text{kg} \) and radius \( 25.0 \) \( \text{cm} \) connected by four thin rods, each of mass \( 5.00 \) \( \text{kg} \) and length \( 0.75 \) \( \text{m} \), to a thin-outer ring of mass \( 20.0 \) \( \text{kg} \). A small chunk of metal of mass \( 1.00 \) \( \text{kg} \) is welded to the outer ring. Determine the moment of inertia of the entire assembly about the center of the inner cylinder, treating the metal chunk as a point mass. Hint: The moment of inertia of a disk about it center is \(\tfrac{1}{2} M R^2\), a thin rod about it center is \(\tfrac{1}{12}ML^2\), and a thin hoop about its center is \(I = MR^2\).
A high-speed flywheel in a motor is spinning at \( 500 \) \( \text{rpm} \) when a power failure suddenly occurs. The flywheel has a mass of \( 40 \) \( \text{kg} \) and a diameter of \( 75 \) \( \text{cm} \). The power is off for \( 30 \) \( \text{s} \) and during this time the flywheel slows due to friction in its axle bearings. During this time the flywheel makes \( 200 \) complete revolutions.
Consider a rigid body that is rotating. Which of the following is an accurate statement?
Old-fashioned clocks and watches have an hour hand, a minute hand and a second hand. What is the angular frequency of the second hand?
A uniform, solid, \( 100 \) \( \text{kg} \) cylinder with a diameter of \( 1.0 \) \( \text{m} \) is mounted so it is free to rotate about a fixed, horizontal, frictionless axis that passes through the centers of its circular ends. A \( 10 \) \( \text{kg} \) block is hung from a very light, thin cord wrapped around the cylinder’s circumference. When the block is released, the cord unwinds and the block accelerates downward. What is the acceleration of the block?
A person’s center of mass is easily found by having the person lie on a reaction board. A horizontal, \( 2.3 \) \( \text{m} \)-long, \( 6.1 \) \( \text{kg} \) reaction board is supported only at the ends, with one end resting on a scale and the other on a pivot. A \( 64 \) \( \text{kg} \) woman lies on the reaction board with her feet over the pivot. The scale reads \( 27 \) \( \text{kg} \). What is the distance from the woman’s feet to her center of mass? Express your answer with the appropriate units.
A 6.0-cm-diameter gear rotates with angular velocity \( \omega = \left(20-\frac {1}{2} t^2 \right) \, \text {rad/s} \), where \(t\) is in seconds. At \(t = 4.0 \, \text{s}\), what are
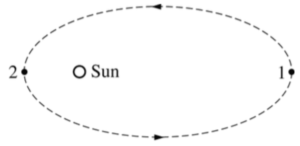
The elliptical orbit of a comet is shown above. Positions 1 and 2 are, respectively, the farthest and nearest positions to the Sun, and at position 1 the distance from the comet to the Sun is 10 times that at position 2. At position 2, the comet’s kinetic energy is
At time \( t = 0 \), a disk starts from rest and begins spinning about its center with a constant angular acceleration of magnitude \( \alpha \). At time \( t_f \), the disk has angular speed \( \omega_f \). Which of the following expressions correctly compares the final angular displacement \( \theta_f \) of the disk at time \( t_f \) to the angular displacement \( \theta_{1/2} \) at time \( \frac{t_f}{2} \)?
\(\tau_{\text{net},A}=(1-\sqrt2)F\;\text{Nm}\;\text{(clockwise)},\;\tau_{\text{net},B}=0\;\text{Nm},\;\tau_{\text{net},C}=0\;\text{Nm}\)
By continuing you (1) agree to our Terms of Use and Terms of Sale and (2) consent to sharing your IP and browser information used by this site’s security protocols as outlined in our Privacy Policy.
| Kinematics | Forces |
|---|---|
| \(\Delta x = v_i t + \frac{1}{2} at^2\) | \(F = ma\) |
| \(v = v_i + at\) | \(F_g = \frac{G m_1 m_2}{r^2}\) |
| \(v^2 = v_i^2 + 2a \Delta x\) | \(f = \mu N\) |
| \(\Delta x = \frac{v_i + v}{2} t\) | \(F_s =-kx\) |
| \(v^2 = v_f^2 \,-\, 2a \Delta x\) |
| Circular Motion | Energy |
|---|---|
| \(F_c = \frac{mv^2}{r}\) | \(KE = \frac{1}{2} mv^2\) |
| \(a_c = \frac{v^2}{r}\) | \(PE = mgh\) |
| \(T = 2\pi \sqrt{\frac{r}{g}}\) | \(KE_i + PE_i = KE_f + PE_f\) |
| \(W = Fd \cos\theta\) |
| Momentum | Torque and Rotations |
|---|---|
| \(p = mv\) | \(\tau = r \cdot F \cdot \sin(\theta)\) |
| \(J = \Delta p\) | \(I = \sum mr^2\) |
| \(p_i = p_f\) | \(L = I \cdot \omega\) |
| Simple Harmonic Motion | Fluids |
|---|---|
| \(F = -kx\) | \(P = \frac{F}{A}\) |
| \(T = 2\pi \sqrt{\frac{l}{g}}\) | \(P_{\text{total}} = P_{\text{atm}} + \rho gh\) |
| \(T = 2\pi \sqrt{\frac{m}{k}}\) | \(Q = Av\) |
| \(x(t) = A \cos(\omega t + \phi)\) | \(F_b = \rho V g\) |
| \(a = -\omega^2 x\) | \(A_1v_1 = A_2v_2\) |
| Constant | Description |
|---|---|
| [katex]g[/katex] | Acceleration due to gravity, typically [katex]9.8 , \text{m/s}^2[/katex] on Earth’s surface |
| [katex]G[/katex] | Universal Gravitational Constant, [katex]6.674 \times 10^{-11} , \text{N} \cdot \text{m}^2/\text{kg}^2[/katex] |
| [katex]\mu_k[/katex] and [katex]\mu_s[/katex] | Coefficients of kinetic ([katex]\mu_k[/katex]) and static ([katex]\mu_s[/katex]) friction, dimensionless. Static friction ([katex]\mu_s[/katex]) is usually greater than kinetic friction ([katex]\mu_k[/katex]) as it resists the start of motion. |
| [katex]k[/katex] | Spring constant, in [katex]\text{N/m}[/katex] |
| [katex] M_E = 5.972 \times 10^{24} , \text{kg} [/katex] | Mass of the Earth |
| [katex] M_M = 7.348 \times 10^{22} , \text{kg} [/katex] | Mass of the Moon |
| [katex] M_M = 1.989 \times 10^{30} , \text{kg} [/katex] | Mass of the Sun |
| Variable | SI Unit |
|---|---|
| [katex]s[/katex] (Displacement) | [katex]\text{meters (m)}[/katex] |
| [katex]v[/katex] (Velocity) | [katex]\text{meters per second (m/s)}[/katex] |
| [katex]a[/katex] (Acceleration) | [katex]\text{meters per second squared (m/s}^2\text{)}[/katex] |
| [katex]t[/katex] (Time) | [katex]\text{seconds (s)}[/katex] |
| [katex]m[/katex] (Mass) | [katex]\text{kilograms (kg)}[/katex] |
| Variable | Derived SI Unit |
|---|---|
| [katex]F[/katex] (Force) | [katex]\text{newtons (N)}[/katex] |
| [katex]E[/katex], [katex]PE[/katex], [katex]KE[/katex] (Energy, Potential Energy, Kinetic Energy) | [katex]\text{joules (J)}[/katex] |
| [katex]P[/katex] (Power) | [katex]\text{watts (W)}[/katex] |
| [katex]p[/katex] (Momentum) | [katex]\text{kilogram meters per second (kgm/s)}[/katex] |
| [katex]\omega[/katex] (Angular Velocity) | [katex]\text{radians per second (rad/s)}[/katex] |
| [katex]\tau[/katex] (Torque) | [katex]\text{newton meters (Nm)}[/katex] |
| [katex]I[/katex] (Moment of Inertia) | [katex]\text{kilogram meter squared (kgm}^2\text{)}[/katex] |
| [katex]f[/katex] (Frequency) | [katex]\text{hertz (Hz)}[/katex] |
Metric Prefixes
Example of using unit analysis: Convert 5 kilometers to millimeters.
Start with the given measurement: [katex]\text{5 km}[/katex]
Use the conversion factors for kilometers to meters and meters to millimeters: [katex]\text{5 km} \times \frac{10^3 \, \text{m}}{1 \, \text{km}} \times \frac{10^3 \, \text{mm}}{1 \, \text{m}}[/katex]
Perform the multiplication: [katex]\text{5 km} \times \frac{10^3 \, \text{m}}{1 \, \text{km}} \times \frac{10^3 \, \text{mm}}{1 \, \text{m}} = 5 \times 10^3 \times 10^3 \, \text{mm}[/katex]
Simplify to get the final answer: [katex]\boxed{5 \times 10^6 \, \text{mm}}[/katex]
Prefix | Symbol | Power of Ten | Equivalent |
|---|---|---|---|
Pico- | p | [katex]10^{-12}[/katex] | 0.000000000001 |
Nano- | n | [katex]10^{-9}[/katex] | 0.000000001 |
Micro- | µ | [katex]10^{-6}[/katex] | 0.000001 |
Milli- | m | [katex]10^{-3}[/katex] | 0.001 |
Centi- | c | [katex]10^{-2}[/katex] | 0.01 |
Deci- | d | [katex]10^{-1}[/katex] | 0.1 |
(Base unit) | – | [katex]10^{0}[/katex] | 1 |
Deca- or Deka- | da | [katex]10^{1}[/katex] | 10 |
Hecto- | h | [katex]10^{2}[/katex] | 100 |
Kilo- | k | [katex]10^{3}[/katex] | 1,000 |
Mega- | M | [katex]10^{6}[/katex] | 1,000,000 |
Giga- | G | [katex]10^{9}[/katex] | 1,000,000,000 |
Tera- | T | [katex]10^{12}[/katex] | 1,000,000,000,000 |
One price to unlock most advanced version of Phy across all our tools.
per month
Billed Monthly. Cancel Anytime.
Try our free calculator to see what you need to get a 5 on the 2026 AP Physics 1 exam.
A quick explanation
Credits are used to grade your FRQs and GQs. Pro users get unlimited credits.
Submitting counts as 1 attempt.
Viewing answers or explanations count as a failed attempts.
Phy gives partial credit if needed
MCQs and GQs are are 1 point each. FRQs will state points for each part.
Phy customizes problem explanations based on what you struggle with. Just hit the explanation button to see.
Understand you mistakes quicker.

Phy automatically provides feedback so you can improve your responses.
10 Free Credits To Get You Started

By continuing you agree to nerd-notes.com Terms of Service, Privacy Policy, and our usage of user data.
Feeling uneasy about your next physics test? We'll boost your grade in 3 lessons or less—guaranteed

NEW! PHY AI accurately solves all questions
🔥 Get up to 30% off Elite Physics Tutoring
🧠 NEW! Learn Physics From Scratch Self Paced Course
🎯 Need exam style practice questions?
