
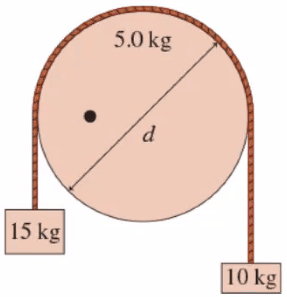
The axle (the black dot) in Figure 1 is half the distance from the center to the rim. Suppose \( d = 30 \) \( \text{cm} \). What is the torque that the axle must apply to prevent the disk from rotating? Express your answer in newton-meters. Use positive value for the counterclockwise torque and negative value for the clockwise torque.
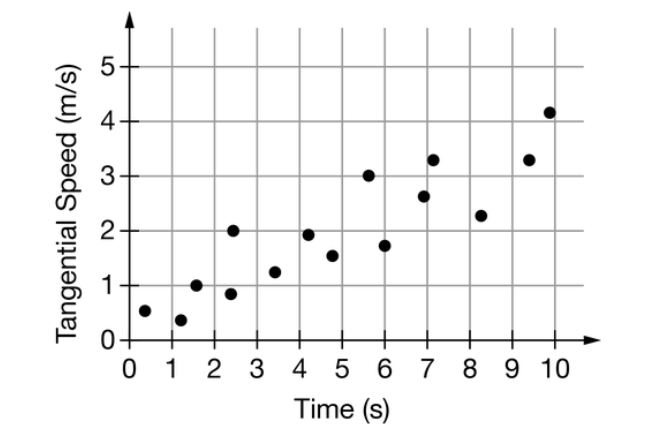
In an experiment, an external torque is applied to the edge of a disk of radius \( 0.5 \) \( \text{m} \) such that the edge of the disk speeds up as it continues to rotate. The tangential speed as a function of time is shown for the edge of the disk. The rotational inertia of the disk is \( 0.125 \) \( \text{kg} \cdot \text{m}^2 \). Can a student use the graph and the known information to calculate the net torque exerted on the edge of the disk?
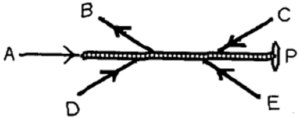
Five forces act on a rod that is free to pivot at point \( P \), as shown in the figure. Which of these forces is producing a counter-clockwise torque about point \( P \)?



