| Step | Derivation/Formula | Reasoning |
|---|---|---|
| 1 | \[L = mvr_{\perp}\] | The angular momentum magnitude of one car about the flagpole is \(L=mvr_{\perp}\), where \(r_{\perp}\) is the perpendicular distance from the flagpole to the car’s line of motion. |
| 2 | \[v_A = \frac{d_B}{t_f}\] | Car \(A\) moves east and reaches the intersection in time \(t_f\). From the geometry, the distance Car \(A\) travels to the intersection is \(d_B\), so its constant speed is \(v_A=\frac{d_B}{t_f}\). |
| 3 | \[v_B = \frac{d_A}{t_f}\] | Car \(B\) moves north and reaches the intersection in time \(t_f\). From the geometry, the distance Car \(B\) travels to the intersection is \(d_A\), so its constant speed is \(v_B=\frac{d_A}{t_f}\). |
| 4 | \[L_A = m_A v_A d_A\] | For Car \(A\), the perpendicular distance from the flagpole to its road is \(d_A\). Therefore, its angular momentum magnitude about the flagpole is \(L_A=m_Av_Ad_A\). |
| 5 | \[L_A = m_A\left(\frac{d_B}{t_f}\right)d_A\] | Substitute \(v_A=\frac{d_B}{t_f}\) into the expression for Car \(A\)’s angular momentum. |
| 6 | \[L_A = \frac{m_A d_A d_B}{t_f}\] | This is the magnitude of Car \(A\)’s angular momentum about the flagpole at \(t=0\). |
| 7 | \[L_B = m_B v_B d_B\] | For Car \(B\), the perpendicular distance from the flagpole to its road is \(d_B\). Therefore, its angular momentum magnitude about the flagpole is \(L_B=m_Bv_Bd_B\). |
| 8 | \[L_B = m_B\left(\frac{d_A}{t_f}\right)d_B\] | Substitute \(v_B=\frac{d_A}{t_f}\) into the expression for Car \(B\)’s angular momentum. |
| 9 | \[L_B = \frac{m_B d_A d_B}{t_f}\] | This is the magnitude of Car \(B\)’s angular momentum about the flagpole at \(t=0\). |
| 10 | \[L_{\text{total}} = \left|L_B – L_A\right|\] | The angular momenta point in opposite directions because one car’s motion produces clockwise rotation about the flagpole and the other produces counterclockwise rotation. Therefore, the total angular momentum magnitude is the absolute value of the difference. |
| 11 | \[L_{\text{total}} = \left|\frac{m_B d_A d_B}{t_f} – \frac{m_A d_A d_B}{t_f}\right|\] | Substitute the expressions for \(L_A\) and \(L_B\) into the total angular momentum expression. |
| 12 | \[L_{\text{total}} = \left|\frac{(m_B-m_A)d_A d_B}{t_f}\right|\] | Factor out the common term \(\frac{d_A d_B}{t_f}\). Among the choices, this corresponds to choice \(\text{B}\), assuming the listed expression represents the signed difference whose magnitude is intended. |
| 13 | \[\boxed{\frac{(m_B-m_A)d_A d_B}{t_f}}\] | The correct multiple-choice answer is \(\text{B}\). Choice \(\text{A}\) would be correct only if the two angular momenta were in the same direction. Choices \(\text{C}\) and \(\text{D}\) include only one car’s contribution, so each ignores the angular momentum of the other car. |
A Major Upgrade To Phy Is Coming Soon — Stay Tuned

We'll help clarify entire units in one hour or less — guaranteed.
A self paced course with videos, problems sets, and everything you need to get a 5. Trusted by over 15k students and over 200 schools.
A net torque is applied to the edge of a spinning object as it rotates about its internal axis. The table shows the net torque exerted on the object at different instants in time. How can a student use the data table to determine the change in angular momentum of the object from \( 0 \) to \( 6 \) \( \text{s} \)? Justify your selection.
| Time \( (\text{s}) \) | Net Torque \( (\text{N} \cdot \text{m}) \) |
|---|---|
| 0 | 0 |
| 2 | 1.5 |
| 4 | 3.0 |
| 6 | 4.5 |
An ice skater that is spinning in circles has an initial rotational inertia \(I_i\). You can approximate her shape to be a cylinder. She is spinning with velocity \(\omega_i\). As she extends her arms, her rotational inertia changes by a factor of \(x\) and her angular velocity changes by a factor of \(y\). Which one of the following options best describe \(x\) and \(y\)?
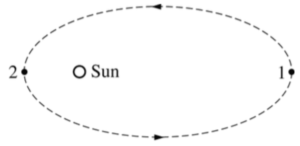
The elliptical orbit of a comet is shown above. Positions 1 and 2 are, respectively, the farthest and nearest positions to the Sun, and at position 1 the distance from the comet to the Sun is 10 times that at position 2. What is the ratio \(v_1\)/\(v_2\) of the speed of the comet at position 1 to the speed at position 2?
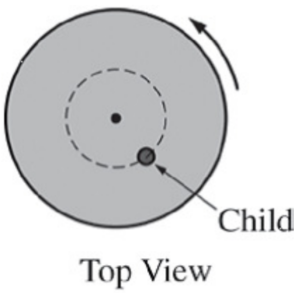
The diagram above shows a top view of a child of mass \(M\) on a circular platform of mass \(2M\) that is rotating counterclockwise. Assume the platform rotates without friction. Which of the following describes an action by the child that will increase the angular speed of the platform-child system and gives the correct reason why?
A planet of constant mass orbits the sun in an elliptical orbit. Neglecting any friction effects, what happens to the planet’s rotational kinetic energy about the sun’s center?
A spinning ice skater on extremely smooth ice is able to control the rate at which she rotates by pulling in her arms. Which of the following statements are true about the skater during this process?
A friend is balancing a fork on one finger. Which of the following are correct explanations of how he accomplishes this? Select two answers.
When is the angular momentum of a system constant?

The graph above shows the angular velocity of a spinning wheel (radius = \( 25 \) \( \text{cm} \)) as a function of time.
An ice skater performs a pirouette (a fast spin) by pulling in his outstretched arms close to his body. What happens to his angular momentum about the axis of rotation?
By continuing you (1) agree to our Terms of Use and Terms of Sale and (2) consent to sharing your IP and browser information used by this site’s security protocols as outlined in our Privacy Policy.
| Kinematics | Forces |
|---|---|
| \(\Delta x = v_i t + \frac{1}{2} at^2\) | \(F = ma\) |
| \(v = v_i + at\) | \(F_g = \frac{G m_1 m_2}{r^2}\) |
| \(v^2 = v_i^2 + 2a \Delta x\) | \(f = \mu N\) |
| \(\Delta x = \frac{v_i + v}{2} t\) | \(F_s =-kx\) |
| \(v^2 = v_f^2 \,-\, 2a \Delta x\) |
| Circular Motion | Energy |
|---|---|
| \(F_c = \frac{mv^2}{r}\) | \(KE = \frac{1}{2} mv^2\) |
| \(a_c = \frac{v^2}{r}\) | \(PE = mgh\) |
| \(T = 2\pi \sqrt{\frac{r}{g}}\) | \(KE_i + PE_i = KE_f + PE_f\) |
| \(W = Fd \cos\theta\) |
| Momentum | Torque and Rotations |
|---|---|
| \(p = mv\) | \(\tau = r \cdot F \cdot \sin(\theta)\) |
| \(J = \Delta p\) | \(I = \sum mr^2\) |
| \(p_i = p_f\) | \(L = I \cdot \omega\) |
| Simple Harmonic Motion | Fluids |
|---|---|
| \(F = -kx\) | \(P = \frac{F}{A}\) |
| \(T = 2\pi \sqrt{\frac{l}{g}}\) | \(P_{\text{total}} = P_{\text{atm}} + \rho gh\) |
| \(T = 2\pi \sqrt{\frac{m}{k}}\) | \(Q = Av\) |
| \(x(t) = A \cos(\omega t + \phi)\) | \(F_b = \rho V g\) |
| \(a = -\omega^2 x\) | \(A_1v_1 = A_2v_2\) |
| Constant | Description |
|---|---|
| [katex]g[/katex] | Acceleration due to gravity, typically [katex]9.8 , \text{m/s}^2[/katex] on Earth’s surface |
| [katex]G[/katex] | Universal Gravitational Constant, [katex]6.674 \times 10^{-11} , \text{N} \cdot \text{m}^2/\text{kg}^2[/katex] |
| [katex]\mu_k[/katex] and [katex]\mu_s[/katex] | Coefficients of kinetic ([katex]\mu_k[/katex]) and static ([katex]\mu_s[/katex]) friction, dimensionless. Static friction ([katex]\mu_s[/katex]) is usually greater than kinetic friction ([katex]\mu_k[/katex]) as it resists the start of motion. |
| [katex]k[/katex] | Spring constant, in [katex]\text{N/m}[/katex] |
| [katex] M_E = 5.972 \times 10^{24} , \text{kg} [/katex] | Mass of the Earth |
| [katex] M_M = 7.348 \times 10^{22} , \text{kg} [/katex] | Mass of the Moon |
| [katex] M_M = 1.989 \times 10^{30} , \text{kg} [/katex] | Mass of the Sun |
| Variable | SI Unit |
|---|---|
| [katex]s[/katex] (Displacement) | [katex]\text{meters (m)}[/katex] |
| [katex]v[/katex] (Velocity) | [katex]\text{meters per second (m/s)}[/katex] |
| [katex]a[/katex] (Acceleration) | [katex]\text{meters per second squared (m/s}^2\text{)}[/katex] |
| [katex]t[/katex] (Time) | [katex]\text{seconds (s)}[/katex] |
| [katex]m[/katex] (Mass) | [katex]\text{kilograms (kg)}[/katex] |
| Variable | Derived SI Unit |
|---|---|
| [katex]F[/katex] (Force) | [katex]\text{newtons (N)}[/katex] |
| [katex]E[/katex], [katex]PE[/katex], [katex]KE[/katex] (Energy, Potential Energy, Kinetic Energy) | [katex]\text{joules (J)}[/katex] |
| [katex]P[/katex] (Power) | [katex]\text{watts (W)}[/katex] |
| [katex]p[/katex] (Momentum) | [katex]\text{kilogram meters per second (kgm/s)}[/katex] |
| [katex]\omega[/katex] (Angular Velocity) | [katex]\text{radians per second (rad/s)}[/katex] |
| [katex]\tau[/katex] (Torque) | [katex]\text{newton meters (Nm)}[/katex] |
| [katex]I[/katex] (Moment of Inertia) | [katex]\text{kilogram meter squared (kgm}^2\text{)}[/katex] |
| [katex]f[/katex] (Frequency) | [katex]\text{hertz (Hz)}[/katex] |
Metric Prefixes
Example of using unit analysis: Convert 5 kilometers to millimeters.
Start with the given measurement: [katex]\text{5 km}[/katex]
Use the conversion factors for kilometers to meters and meters to millimeters: [katex]\text{5 km} \times \frac{10^3 \, \text{m}}{1 \, \text{km}} \times \frac{10^3 \, \text{mm}}{1 \, \text{m}}[/katex]
Perform the multiplication: [katex]\text{5 km} \times \frac{10^3 \, \text{m}}{1 \, \text{km}} \times \frac{10^3 \, \text{mm}}{1 \, \text{m}} = 5 \times 10^3 \times 10^3 \, \text{mm}[/katex]
Simplify to get the final answer: [katex]\boxed{5 \times 10^6 \, \text{mm}}[/katex]
Prefix | Symbol | Power of Ten | Equivalent |
|---|---|---|---|
Pico- | p | [katex]10^{-12}[/katex] | 0.000000000001 |
Nano- | n | [katex]10^{-9}[/katex] | 0.000000001 |
Micro- | µ | [katex]10^{-6}[/katex] | 0.000001 |
Milli- | m | [katex]10^{-3}[/katex] | 0.001 |
Centi- | c | [katex]10^{-2}[/katex] | 0.01 |
Deci- | d | [katex]10^{-1}[/katex] | 0.1 |
(Base unit) | – | [katex]10^{0}[/katex] | 1 |
Deca- or Deka- | da | [katex]10^{1}[/katex] | 10 |
Hecto- | h | [katex]10^{2}[/katex] | 100 |
Kilo- | k | [katex]10^{3}[/katex] | 1,000 |
Mega- | M | [katex]10^{6}[/katex] | 1,000,000 |
Giga- | G | [katex]10^{9}[/katex] | 1,000,000,000 |
Tera- | T | [katex]10^{12}[/katex] | 1,000,000,000,000 |
One price to unlock most advanced version of Phy across all our tools.
per month
Billed Monthly. Cancel Anytime.
Try our free calculator to see what you need to get a 5 on the 2026 AP Physics 1 exam.
A quick explanation
Credits are used to grade your FRQs and GQs. Pro users get unlimited credits.
Submitting counts as 1 attempt.
Viewing answers or explanations count as a failed attempts.
Phy gives partial credit if needed
MCQs and GQs are are 1 point each. FRQs will state points for each part.
Phy customizes problem explanations based on what you struggle with. Just hit the explanation button to see.
Understand you mistakes quicker.

Phy automatically provides feedback so you can improve your responses.
10 Free Credits To Get You Started

By continuing you agree to nerd-notes.com Terms of Service, Privacy Policy, and our usage of user data.
Feeling uneasy about your next physics test? We'll boost your grade in 3 lessons or less—guaranteed

NEW! PHY AI accurately solves all questions
🔥 Get up to 30% off Elite Physics Tutoring
🧠 NEW! Learn Physics From Scratch Self Paced Course
🎯 Need exam style practice questions?
