
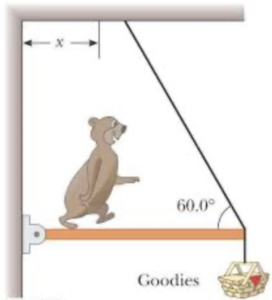
A hungry bear weighing 700 N walks out on a beam in an attempt to retrieve a basket of goodies hanging at the end of the beam. The beam is uniform, weighs 200 N, and is 6.00 m long. The goodies weigh 80 N.
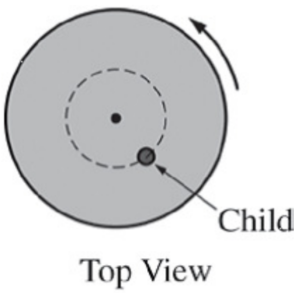
The diagram above shows a top view of a child of mass \(M\) on a circular platform of mass \(2M\) that is rotating counterclockwise. Assume the platform rotates without friction. Which of the following describes an action by the child that will increase the angular speed of the platform-child system and gives the correct reason why?
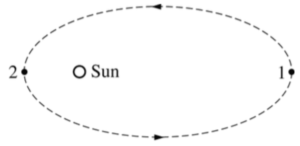
The elliptical orbit of a comet is shown above. Positions 1 and 2 are, respectively, the farthest and nearest positions to the Sun, and at position 1 the distance from the comet to the Sun is 10 times that at position 2. What is the ratio \(v_1\)/\(v_2\) of the speed of the comet at position 1 to the speed at position 2?



