
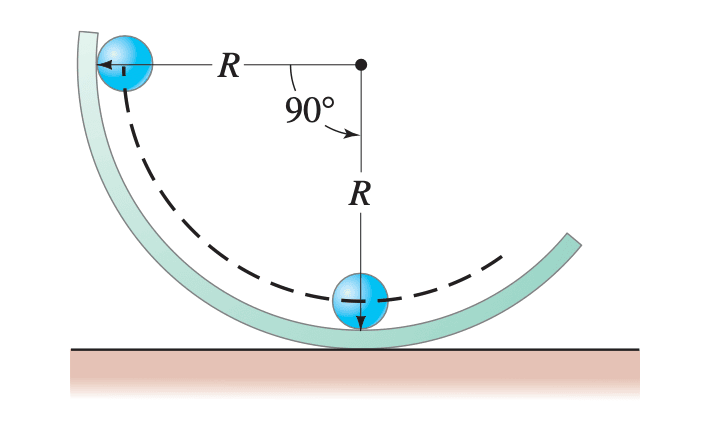
A ball of radius \( r \) rolls on the inside of a circular track of radius \( R \). If the ball starts from rest at the left vertical edge of the track, what will be its speed when it reaches the lowest point of the track, rolling without slipping? For a solid spherical ball, the moment of inertia is \(\frac{2}{5} m r^2\).
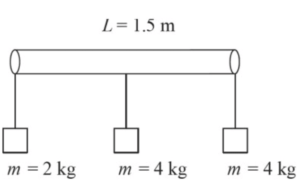
Three masses are attached to a \( 1.5 \, \text{m} \) long massless bar. Mass 1 is \( 2 \, \text{kg} \) and is attached to the far left side of the bar. Mass 2 is \( 4 \, \text{kg} \) and is attached to the far right side of the bar. Mass 3 is \( 4 \, \text{kg} \) and is attached to the middle of the bar. At what distance from the far left side of the bar can a string be attached to hold the bar up horizontally?
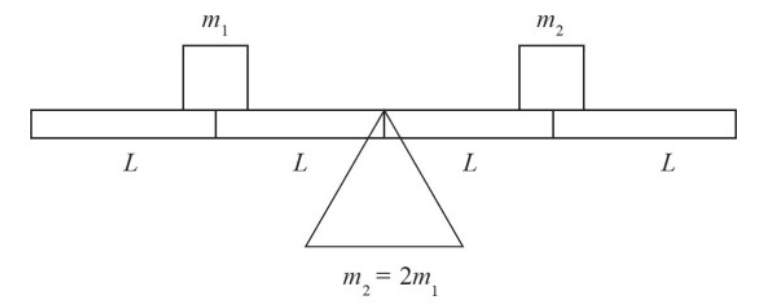
The system above is NOT balanced since \(m_2\) is twice the mass of \(m_1\). Which of the following changes would NOT balance the system so that there is 0 net torque? Assume the plank has no mass of its own.
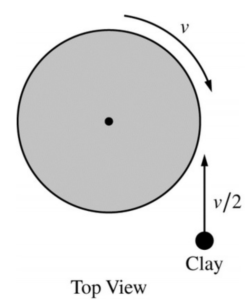
A system consists of a disk rotating on a frictionless axle and a piece of clay moving toward it, as shown in the figure above. The outside edge of the disk is moving at a linear speed \( v \), and the clay is moving at speed \( \frac{v}{2} \). The clay sticks to the outside edge of the disk. How does the angular momentum of the system after the clay sticks compare to the angular momentum of the system before the clay sticks, and what is an explanation for the comparison?



