
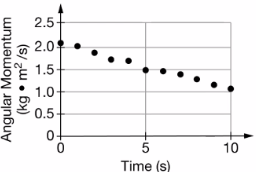
During the experiment, students collect data about the angular momentum of a rigid, uniform spinning wheel about an axle as a function of time, which was used to create the graph that is shown. A frictional torque is exerted on the wheel. A student makes the following statement about the data. “The frictional torque exerted on the wheel is independent of the wheel’s angular speed.” Does the data from the graph support the student’s statement? Justify your selection.
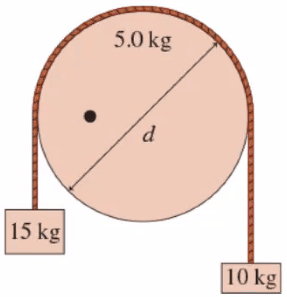
The axle (the black dot) in Figure 1 is half the distance from the center to the rim. Suppose \( d = 30 \) \( \text{cm} \). What is the torque that the axle must apply to prevent the disk from rotating? Express your answer in newton-meters. Use positive value for the counterclockwise torque and negative value for the clockwise torque.
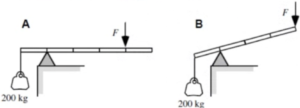
In both cases, a massless rod is supported by a fulcrum, and a \(200 \, \text{kg}\) hanging mass is suspended from the left end of the rod by a cable. A downward force \(F\) keeps the rod in rest. The rod in Case A is \(50 \, \text{cm}\) long, and the rod in Case B is \(40 \, \text{cm}\) long (each rod is marked at \(10 \, \text{cm}\) intervals). The magnitude of each vertical force \(F\) exerted on the rod will be
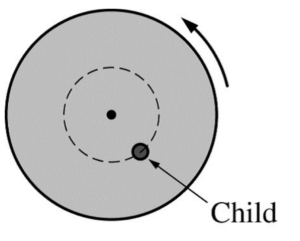
The diagram above shows a top view of a child of mass \(M\) on a circular platform of mass \(5M\)that is rotating counterclockwise. Assume the platform rotates without friction. Which of the following describes an action by the child that will result in an increase in the total angular momentum of the child-platform system?



