
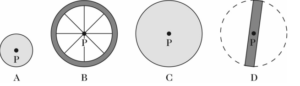
The figure shows scale drawings of four objects, each of the same mass and uniform thickness, with the mass distributed uniformly. Which one has the greatest moment of inertia when rotated about an axis perpendicular to the plane of the drawing at point P?
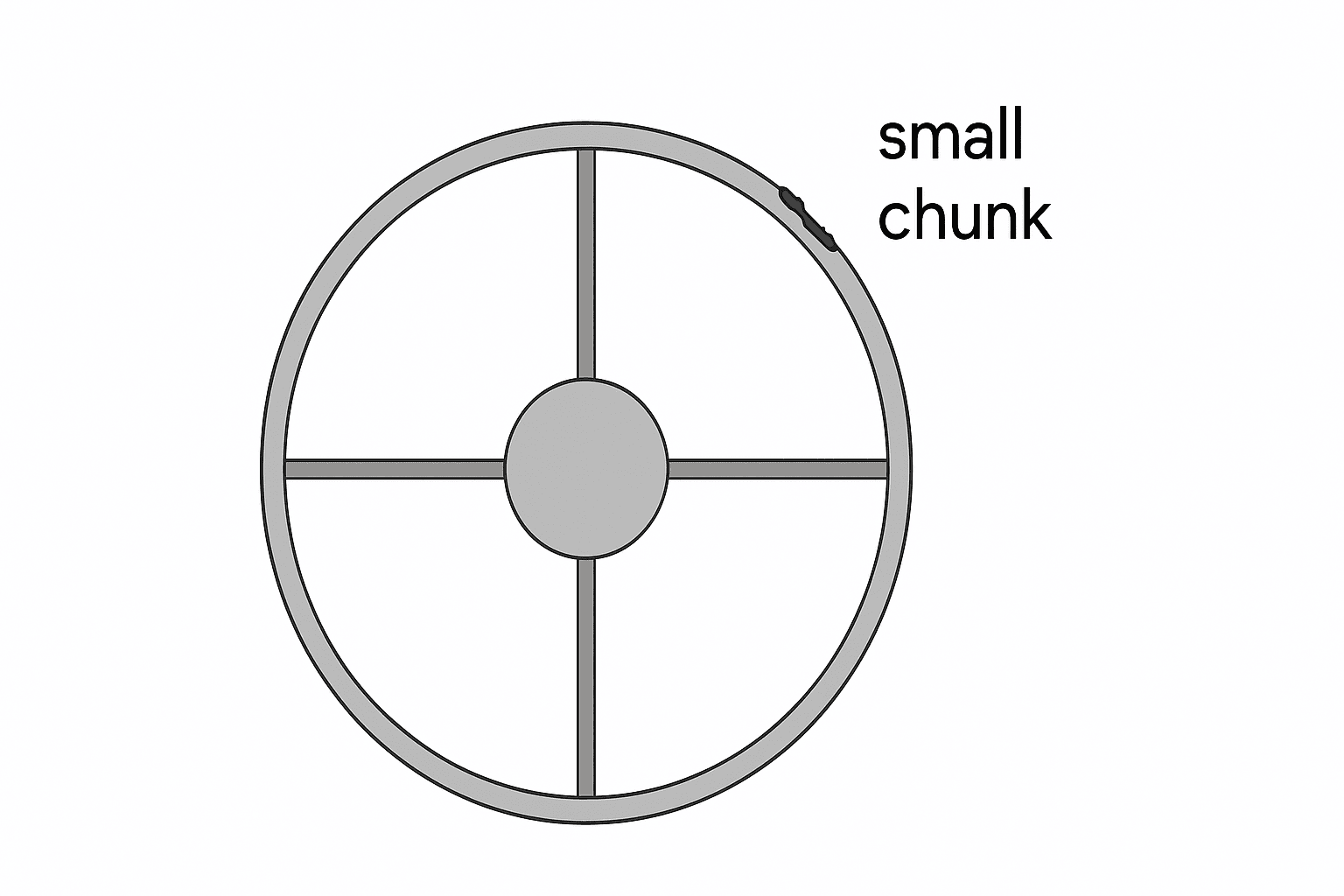
The object shown in the diagram below consists of a cylinder of mass \( 100 \) \( \text{kg} \) and radius \( 25.0 \) \( \text{cm} \) connected by four thin rods, each of mass \( 5.00 \) \( \text{kg} \) and length \( 0.75 \) \( \text{m} \), to a thin-outer ring of mass \( 20.0 \) \( \text{kg} \). A small chunk of metal of mass \( 1.00 \) \( \text{kg} \) is welded to the outer ring. Determine the moment of inertia of the entire assembly about the center of the inner cylinder, treating the metal chunk as a point mass. Hint: The moment of inertia of a disk about it center is \(\tfrac{1}{2} M R^2\), a thin rod about it center is \(\tfrac{1}{12}ML^2\), and a thin hoop about its center is \(I = MR^2\).
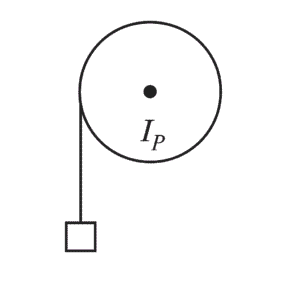
A light string is attached to a massive pulley of known rotational inertia \( I_P \), as shown in the figure. A student must determine the relationship between the torque exerted on the pulley and the change in the pulley’s angular velocity when the torque is applied for \( 2.0 \) \( \text{s} \). In addition to a stopwatch to measure the time interval, what two measurements could the student make in order to determine the relationship? Select two answers.



