
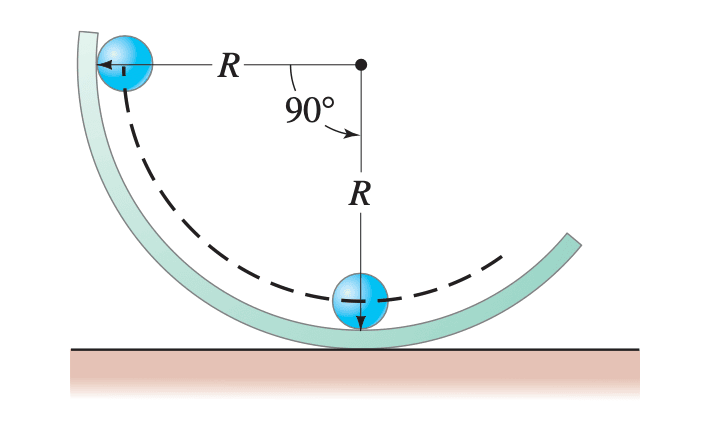
A ball of radius \( r \) rolls on the inside of a circular track of radius \( R \). If the ball starts from rest at the left vertical edge of the track, what will be its speed when it reaches the lowest point of the track, rolling without slipping? For a solid spherical ball, the moment of inertia is \(\frac{2}{5} m r^2\).
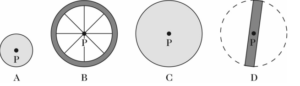
The figure shows scale drawings of four objects, each of the same mass and uniform thickness, with the mass distributed uniformly. Which one has the greatest moment of inertia when rotated about an axis perpendicular to the plane of the drawing at point P?

A massless rigid rod of length \(3d\) is pivoted at a fixed point \(W\), and two forces each of magnitude \(F\) are applied vertically upward as shown above. A third vertical force of magnitude \(F\) may be applied, either upward or downward, at one of the labeled points. With the proper choice of direction at each point, the rod can be in equilibrium if the third force of magnitude \(F\) is applied at point?



