| Derivation or Formula | Reasoning |
|---|---|
| \[m = 25\,\text{g} = 0.025\,\text{kg},\quad d = 24\,\text{cm} = 0.24\,\text{m},\quad r = \frac{d}{2} = 0.12\,\text{m}\] | Convert to SI units and compute the wheel radius \(r\) from the given diameter \(d\). |
| \[\alpha = 470\,\text{rad/s}^2,\quad \Delta\theta = \frac{3}{4}(2\pi) = \frac{3\pi}{2}\] | The angular acceleration is given, and \(\tfrac{3}{4}\) of a revolution corresponds to angular displacement \(\Delta\theta\). |
| \[\tau = I\alpha\] | Torque \(\tau\) relates to angular acceleration \(\alpha\) through rotational dynamics. |
| \[I = mr^2\] | The wheel is negligible mass, so the rotating inertia is dominated by the ball modeled as a point mass at radius \(r\). |
| \[W = \tau\Delta\theta\] | Work done by a constant torque over an angular displacement is \(W = \tau\Delta\theta\). |
| \[W = (I\alpha)\Delta\theta = (mr^2\alpha)\Delta\theta\] | Substitute \(\tau = I\alpha\) and \(I = mr^2\) into the work expression, as indicated in the hint. |
| \[mr^2\alpha\Delta\theta = mgh\] | Use conservation of energy from the very start (rest) to the maximum height: the work put in becomes gravitational potential energy \(mgh\). |
| \[r^2\alpha\Delta\theta = gh\] | Cancel \(m\) from both sides, showing the height does not depend on the ball’s mass. |
| \[h = \frac{r^2\alpha\Delta\theta}{g}\] | Solve algebraically for the maximum height above the starting reference implied by the energy equation. |
| \[h = \frac{(0.12)^2(470)\left(\frac{3\pi}{2}\right)}{9.8}\] | Substitute \(r = 0.12\,\text{m}\), \(\alpha = 470\,\text{rad/s}^2\), \(\Delta\theta = \frac{3\pi}{2}\), and \(g = 9.8\,\text{m/s}^2\). |
| \[h = \frac{(0.0144)(470)\left(\frac{3\pi}{2}\right)}{9.8} = \frac{6.768\left(\frac{3\pi}{2}\right)}{9.8}\] | Compute \(r^2\) and multiply by \(\alpha\) to simplify the numerator step-by-step using algebra. |
| \[h = \frac{6.768(1.5\pi)}{9.8} = \frac{10.152\pi}{9.8}\] | Rewrite \(\frac{3\pi}{2} = 1.5\pi\) and multiply constants. |
| \[\boxed{h \approx 3.25\,\text{m above the center}}\] | The maximum height reached above the center of the wheel. |
A Major Upgrade To Phy Is Coming Soon — Stay Tuned

We'll help clarify entire units in one hour or less — guaranteed.
A self paced course with videos, problems sets, and everything you need to get a 5. Trusted by over 15k students and over 200 schools.
An average adult elephant \( (5000 \, \text{kg}) \) is strapped to a spring, which is then pulled \( 2 \, \text{meters} \) away from its equilibrium position and released. The elephant starts oscillating back and forth with a period of \( 10 \) seconds.
A 75.0kg log floats downstream with a speed of 1.80 m/s. Eight frogs hop onto the log in a series of perfectly inelastic collisions. If each frog has a mass of 0.30 kg and an upstream speed of 1.3 m/s, what is the change in kinetic energy for this system?
A ski tow carries people to the top of a nearby mountain. It operates on a slope of angle \( 15.7^\circ \) of length \( 260 \) \( \text{m} \). The rope moves at a speed of \( 13.0 \) \( \text{km/h} \) and provides power for \( 54 \) riders at one time, with an average mass per rider of \( 67.0 \) \( \text{kg} \).
The downward motion of an elevator is controlled by a cable that unwinds from a cylinder of radius \( 0.20 \) \( \text{m} \). What is the angular velocity of the cylinder when the downward speed of the elevator is \( 1.2 \) \( \text{m/s} \)?
A uniform ladder with mass \( m_2 \) and length \( L \) rests against a smooth wall. A do-it-yourself enthusiast of mass \( m_1 \) stands on the ladder a distance \( d \) from the bottom (measured along the ladder). The ladder makes an angle \( \theta \) with the ground. There is no friction between the wall and the ladder, but there is a frictional force of magnitude \( f \) between the floor and the ladder. \( N_1 \) is the magnitude of the normal force exerted by the wall on the ladder, and \( N_2 \) is the magnitude of the normal force exerted by the ground on the ladder. Throughout the problem, consider counterclockwise torques to be positive.
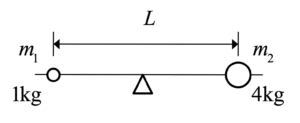
A \( 4 \)-\( \text{kg} \) ball and a \( 1 \)-\( \text{kg} \) ball are positioned a distance \( L \) apart on a bar of negligible mass. How far from the \( 4 \)-\( \text{kg} \) mass should the fulcrum be placed to balance the bar?
Which of the following situations will increase the moment of inertia of a solid cylinder \( I = \tfrac{1}{2} M R^{2} \) by the same amount?
A solid disk has a mass \( M \) and radius \( R \). What is the moment of inertia about an axis that is perpendicular to the plane of the disk and passes through its edge? Hint: the moment of inertia about the disk center is given as \(I_{center}=\frac{1}{2}M R^{2}\).
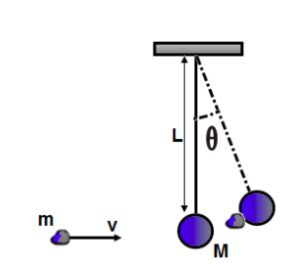
A \(20 \, \text{g}\) piece of clay moving at a speed of \(50 \, \text{m/s}\) strikes a \(500 \, \text{g}\) pendulum bob at rest. The length of a string is \(0.8 \, \text{m}\). After the collision, the clay-bob system starts to oscillate as a simple pendulum.
A uniform ladder of length \(L\) and weight \(W = 50 \, \text{N}\) rests against a smooth vertical wall. If the coefficient of static friction between the ladder and the ground is \(\mu = 0.4\).
\(3.25\,\text{m}\)
By continuing you (1) agree to our Terms of Use and Terms of Sale and (2) consent to sharing your IP and browser information used by this site’s security protocols as outlined in our Privacy Policy.
| Kinematics | Forces |
|---|---|
| \(\Delta x = v_i t + \frac{1}{2} at^2\) | \(F = ma\) |
| \(v = v_i + at\) | \(F_g = \frac{G m_1 m_2}{r^2}\) |
| \(v^2 = v_i^2 + 2a \Delta x\) | \(f = \mu N\) |
| \(\Delta x = \frac{v_i + v}{2} t\) | \(F_s =-kx\) |
| \(v^2 = v_f^2 \,-\, 2a \Delta x\) |
| Circular Motion | Energy |
|---|---|
| \(F_c = \frac{mv^2}{r}\) | \(KE = \frac{1}{2} mv^2\) |
| \(a_c = \frac{v^2}{r}\) | \(PE = mgh\) |
| \(T = 2\pi \sqrt{\frac{r}{g}}\) | \(KE_i + PE_i = KE_f + PE_f\) |
| \(W = Fd \cos\theta\) |
| Momentum | Torque and Rotations |
|---|---|
| \(p = mv\) | \(\tau = r \cdot F \cdot \sin(\theta)\) |
| \(J = \Delta p\) | \(I = \sum mr^2\) |
| \(p_i = p_f\) | \(L = I \cdot \omega\) |
| Simple Harmonic Motion | Fluids |
|---|---|
| \(F = -kx\) | \(P = \frac{F}{A}\) |
| \(T = 2\pi \sqrt{\frac{l}{g}}\) | \(P_{\text{total}} = P_{\text{atm}} + \rho gh\) |
| \(T = 2\pi \sqrt{\frac{m}{k}}\) | \(Q = Av\) |
| \(x(t) = A \cos(\omega t + \phi)\) | \(F_b = \rho V g\) |
| \(a = -\omega^2 x\) | \(A_1v_1 = A_2v_2\) |
| Constant | Description |
|---|---|
| [katex]g[/katex] | Acceleration due to gravity, typically [katex]9.8 , \text{m/s}^2[/katex] on Earth’s surface |
| [katex]G[/katex] | Universal Gravitational Constant, [katex]6.674 \times 10^{-11} , \text{N} \cdot \text{m}^2/\text{kg}^2[/katex] |
| [katex]\mu_k[/katex] and [katex]\mu_s[/katex] | Coefficients of kinetic ([katex]\mu_k[/katex]) and static ([katex]\mu_s[/katex]) friction, dimensionless. Static friction ([katex]\mu_s[/katex]) is usually greater than kinetic friction ([katex]\mu_k[/katex]) as it resists the start of motion. |
| [katex]k[/katex] | Spring constant, in [katex]\text{N/m}[/katex] |
| [katex] M_E = 5.972 \times 10^{24} , \text{kg} [/katex] | Mass of the Earth |
| [katex] M_M = 7.348 \times 10^{22} , \text{kg} [/katex] | Mass of the Moon |
| [katex] M_M = 1.989 \times 10^{30} , \text{kg} [/katex] | Mass of the Sun |
| Variable | SI Unit |
|---|---|
| [katex]s[/katex] (Displacement) | [katex]\text{meters (m)}[/katex] |
| [katex]v[/katex] (Velocity) | [katex]\text{meters per second (m/s)}[/katex] |
| [katex]a[/katex] (Acceleration) | [katex]\text{meters per second squared (m/s}^2\text{)}[/katex] |
| [katex]t[/katex] (Time) | [katex]\text{seconds (s)}[/katex] |
| [katex]m[/katex] (Mass) | [katex]\text{kilograms (kg)}[/katex] |
| Variable | Derived SI Unit |
|---|---|
| [katex]F[/katex] (Force) | [katex]\text{newtons (N)}[/katex] |
| [katex]E[/katex], [katex]PE[/katex], [katex]KE[/katex] (Energy, Potential Energy, Kinetic Energy) | [katex]\text{joules (J)}[/katex] |
| [katex]P[/katex] (Power) | [katex]\text{watts (W)}[/katex] |
| [katex]p[/katex] (Momentum) | [katex]\text{kilogram meters per second (kgm/s)}[/katex] |
| [katex]\omega[/katex] (Angular Velocity) | [katex]\text{radians per second (rad/s)}[/katex] |
| [katex]\tau[/katex] (Torque) | [katex]\text{newton meters (Nm)}[/katex] |
| [katex]I[/katex] (Moment of Inertia) | [katex]\text{kilogram meter squared (kgm}^2\text{)}[/katex] |
| [katex]f[/katex] (Frequency) | [katex]\text{hertz (Hz)}[/katex] |
Metric Prefixes
Example of using unit analysis: Convert 5 kilometers to millimeters.
Start with the given measurement: [katex]\text{5 km}[/katex]
Use the conversion factors for kilometers to meters and meters to millimeters: [katex]\text{5 km} \times \frac{10^3 \, \text{m}}{1 \, \text{km}} \times \frac{10^3 \, \text{mm}}{1 \, \text{m}}[/katex]
Perform the multiplication: [katex]\text{5 km} \times \frac{10^3 \, \text{m}}{1 \, \text{km}} \times \frac{10^3 \, \text{mm}}{1 \, \text{m}} = 5 \times 10^3 \times 10^3 \, \text{mm}[/katex]
Simplify to get the final answer: [katex]\boxed{5 \times 10^6 \, \text{mm}}[/katex]
Prefix | Symbol | Power of Ten | Equivalent |
|---|---|---|---|
Pico- | p | [katex]10^{-12}[/katex] | 0.000000000001 |
Nano- | n | [katex]10^{-9}[/katex] | 0.000000001 |
Micro- | µ | [katex]10^{-6}[/katex] | 0.000001 |
Milli- | m | [katex]10^{-3}[/katex] | 0.001 |
Centi- | c | [katex]10^{-2}[/katex] | 0.01 |
Deci- | d | [katex]10^{-1}[/katex] | 0.1 |
(Base unit) | – | [katex]10^{0}[/katex] | 1 |
Deca- or Deka- | da | [katex]10^{1}[/katex] | 10 |
Hecto- | h | [katex]10^{2}[/katex] | 100 |
Kilo- | k | [katex]10^{3}[/katex] | 1,000 |
Mega- | M | [katex]10^{6}[/katex] | 1,000,000 |
Giga- | G | [katex]10^{9}[/katex] | 1,000,000,000 |
Tera- | T | [katex]10^{12}[/katex] | 1,000,000,000,000 |
One price to unlock most advanced version of Phy across all our tools.
per month
Billed Monthly. Cancel Anytime.
Try our free calculator to see what you need to get a 5 on the 2026 AP Physics 1 exam.
A quick explanation
Credits are used to grade your FRQs and GQs. Pro users get unlimited credits.
Submitting counts as 1 attempt.
Viewing answers or explanations count as a failed attempts.
Phy gives partial credit if needed
MCQs and GQs are are 1 point each. FRQs will state points for each part.
Phy customizes problem explanations based on what you struggle with. Just hit the explanation button to see.
Understand you mistakes quicker.

Phy automatically provides feedback so you can improve your responses.
10 Free Credits To Get You Started

By continuing you agree to nerd-notes.com Terms of Service, Privacy Policy, and our usage of user data.
Feeling uneasy about your next physics test? We'll boost your grade in 3 lessons or less—guaranteed

NEW! PHY AI accurately solves all questions
🔥 Get up to 30% off Elite Physics Tutoring
🧠 NEW! Learn Physics From Scratch Self Paced Course
🎯 Need exam style practice questions?
