
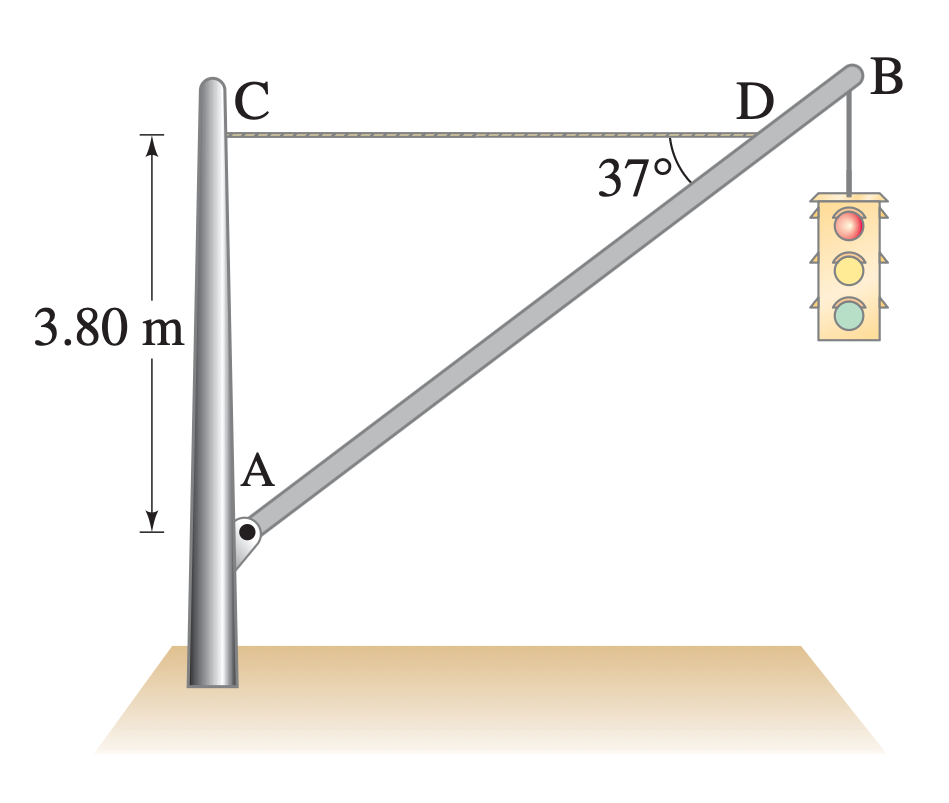
A traffic light hangs from a pole as shown in the diagram. The uniform aluminum pole AB is of length \( 7.20 \) \( \text{m} \) and has a mass of \( 12.0 \) \( \text{kg} \). The mass of the traffic light is \( 21.5 \) \( \text{kg} \). The point C is located \( 3.80 \) \( \text{m} \) vertically above the pivot A. A massless horizontal cable CD is attached at C and connects to the pole at point D, where the pole makes an angle of \( 37^{\circ} \) with the cable.
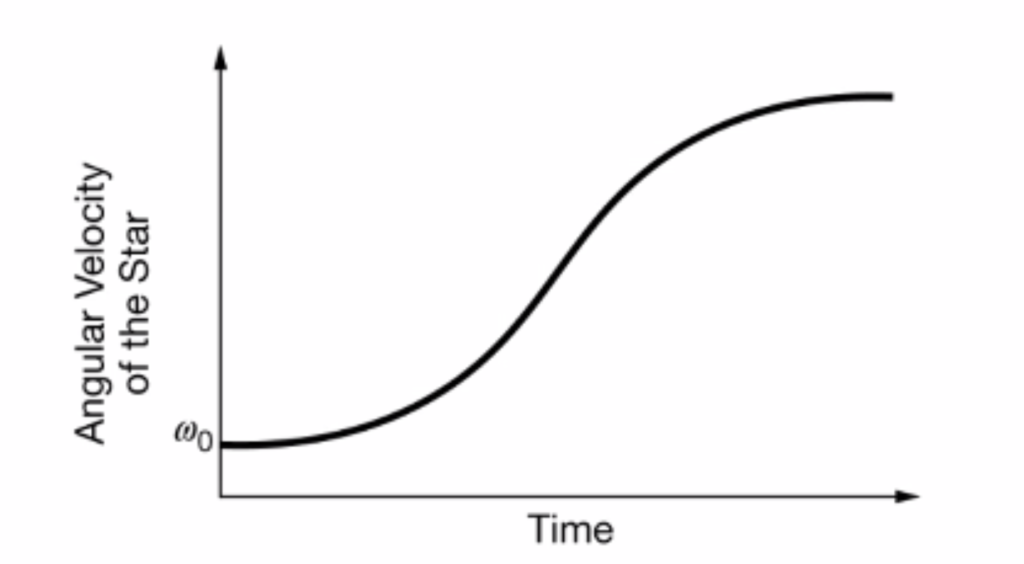
An isolated spherical star of radius \( R_o \), rotates about an axis that passes through its center with an angular velocity of \( \omega_o \). Gravitational forces within the star cause the star’s radius to collapse and decrease to a value \( r_o < R_o \), but the mass of the star remains constant. A graph of the star’s angular velocity as a function of time as it collapses is shown. Which of the following predictions is correct about the angular momentum \( L \) of the star immediately after the collapse?

A sphere starts from rest and rolls down an incline of height \( H = 1.0 \) \( \text{m} \) at an angle of \( 25^\circ \) with the horizontal, as shown above. The radius of the sphere \( R = 15 \) \( \text{cm} \), and its mass \( m = 1.0 \) \( \text{kg} \). The moment of inertia for a sphere is \( \frac{2}{5}mR^2 \). What is the speed of the sphere when it reaches the bottom of the plane?
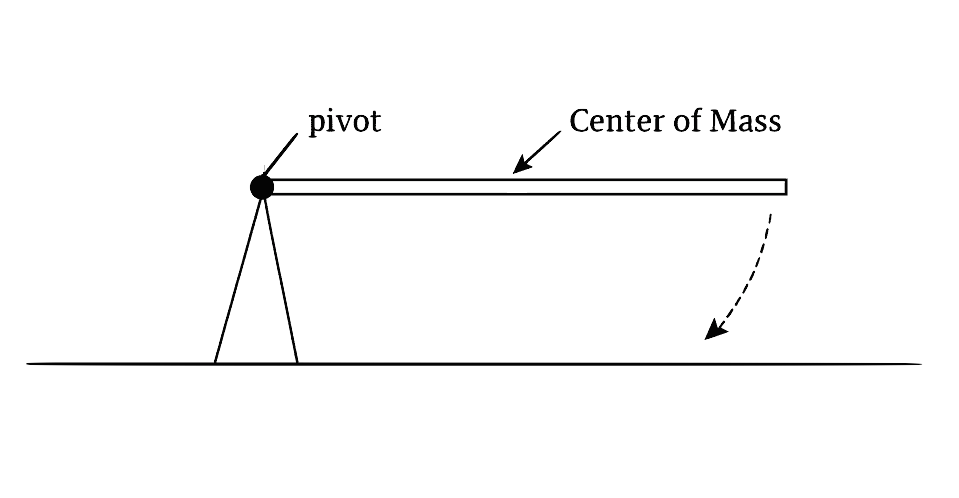
A uniform rod of length \( L \) and mass \( M \) is free to rotate about one end, as shown in the diagram. The free end is released from rest at a horizontal position, as shown. The pivot point is supported by a stand so that only the free end can move. The moment of inertia of a rod about its end is \(\tfrac{1}{3} M L^{2}\).

A rod is initially at rest on a rough horizontal surface. Three forces are exerted on the rod with the magnitudes and directions shown in the figure. The force exerted in the center of the rod is an equidistant 0.5 m from both ends of the rod. If friction between the rod and the table prevents the rod from rotating, what is the magnitude of the torque exerted on the rod about its center from frictional forces?



