
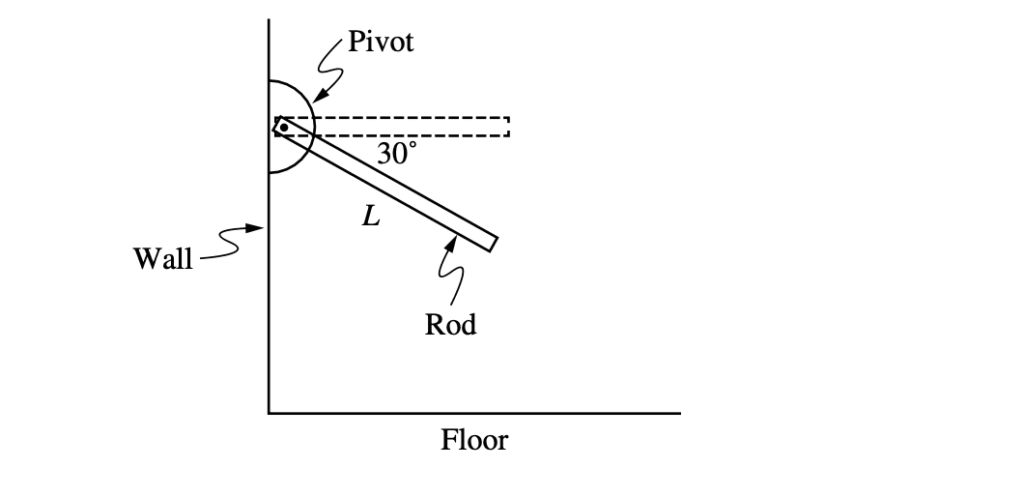
A uniform rod of mass \( M_0 \) and length \( L \) is free to rotate about a pivot at its left end and is released from rest when the rod is \( 30^{\circ} \) below the horizontal, as shown in the figure. With respect to the pivot, the rod has rotational inertia \( I_0 = \dfrac{1}{3} M_0 L^2 \). Which of the following expressions correctly represents the magnitude of the net torque exerted on the rod about the pivot at the moment the rod is released?
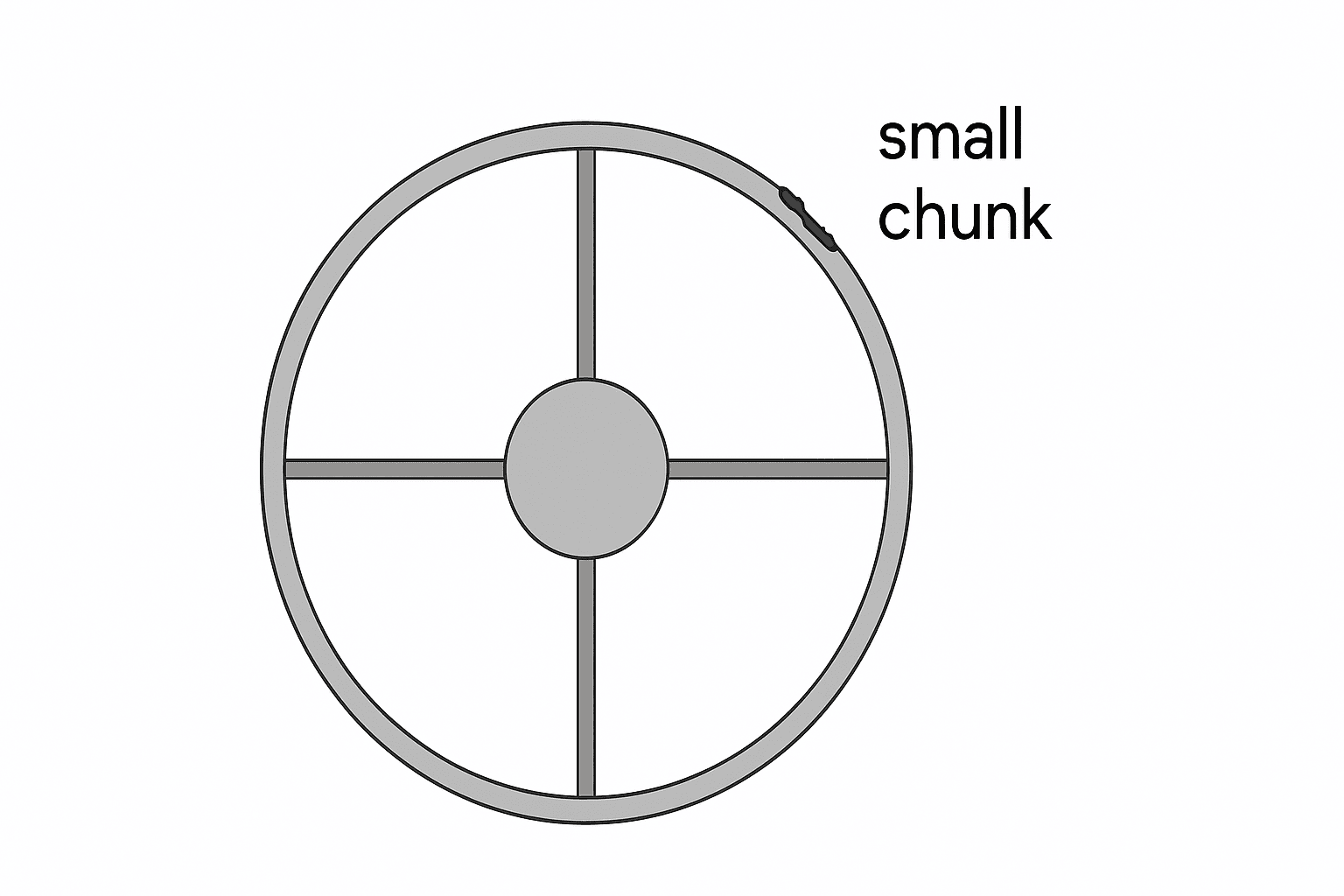
The object shown in the diagram below consists of a cylinder of mass \( 100 \) \( \text{kg} \) and radius \( 25.0 \) \( \text{cm} \) connected by four thin rods, each of mass \( 5.00 \) \( \text{kg} \) and length \( 0.75 \) \( \text{m} \), to a thin-outer ring of mass \( 20.0 \) \( \text{kg} \). A small chunk of metal of mass \( 1.00 \) \( \text{kg} \) is welded to the outer ring. Determine the moment of inertia of the entire assembly about the center of the inner cylinder, treating the metal chunk as a point mass. Hint: The moment of inertia of a disk about it center is \(\tfrac{1}{2} M R^2\), a thin rod about it center is \(\tfrac{1}{12}ML^2\), and a thin hoop about its center is \(I = MR^2\).

A uniform, rigid rod of length \( 2 \) \( \text{m} \) lies on a horizontal surface. One end of the rod can pivot about an axis that is perpendicular to the rod and along the plane of the page. A \( 10 \) \( \text{N} \) force is applied to the rod at its midpoint at an angle of \( 37^{\circ} \). A second force \( F \) is applied to the free end of the rod so that the rod remains at rest, as shown in the figure. The magnitude of the torque produced by force \( F \) is most nearly



