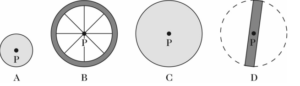
The figure shows scale drawings of four objects, each of the same mass and uniform thickness, with the mass distributed uniformly. Which one has the greatest moment of inertia when rotated about an axis perpendicular to the plane of the drawing at point P?
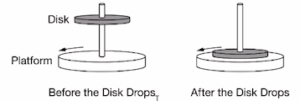
A platform is initially rotating on smooth ice with negligible friction, as shown above. A stationary disk is dropped directly onto the center of the platform. A short time later, the disk and platform rotate together at the same angular velocity, as shown at right in the figure. How does the angular momentum of only the platform change, if at all, after the disk drops? And what is the best justification.
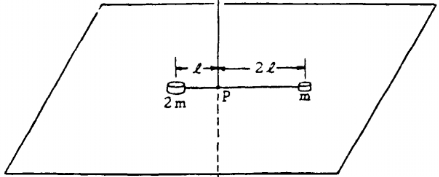
A system consists of two small disks, of masses \( m \) and \( 2m \), attached to a rod of negligible mass of length \( 3l \) as shown above. The rod is free to turn about a vertical axis through point \( P \). The two disks rest on a rough horizontal surface; the coefficient of friction between the disks and the surface is \( \mu \). At time \( t = 0 \), the rod has an initial counterclockwise angular velocity \( \omega_0 \) about \( P \). The system is gradually brought to rest by friction. Develop expressions for the following quantities in terms of \( \mu \), \( m \), \( l \), \( g \), and \( \omega_0 \).



