
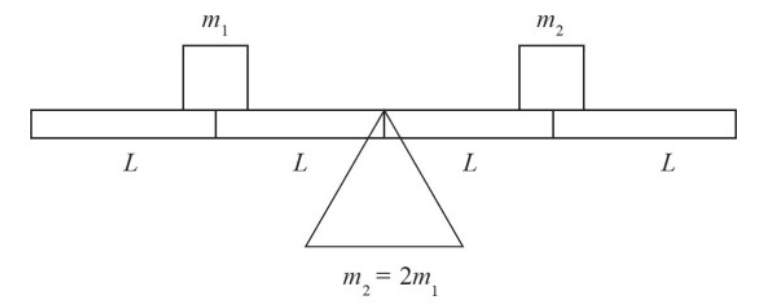
The system above is NOT balanced since \(m_2\) is twice the mass of \(m_1\). Which of the following changes would NOT balance the system so that there is 0 net torque? Assume the plank has no mass of its own.
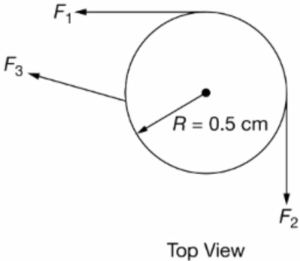
A disk of radius \( R = 0.5 \) \( \text{cm} \) rests on a flat, horizontal surface such that frictional forces are considered to be negligible. Three forces of unknown magnitude are exerted on the edge of the disk, as shown in the figure. Which of the following lists the essential measuring devices that, when used together, are needed to determine the change in angular momentum of the disk after a known time of \( 5.0 \) \( \text{s} \)?
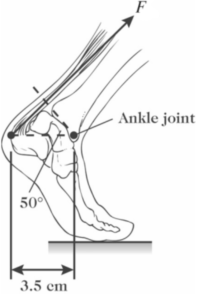
The figure shows a person’s foot. In that figure, the Achilles tendon exerts a force of magnitude F = 720 N. What is the magnitude of the torque that this force produces about the ankle joint?
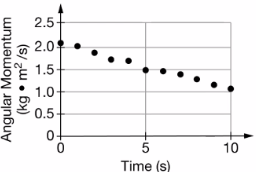
During the experiment, students collect data about the angular momentum of a rigid, uniform spinning wheel about an axle as a function of time, which was used to create the graph that is shown. A frictional torque is exerted on the wheel. A student makes the following statement about the data. “The frictional torque exerted on the wheel is independent of the wheel’s angular speed.” Does the data from the graph support the student’s statement? Justify your selection.
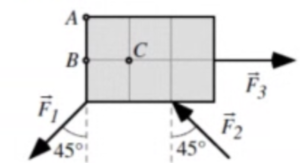
Three forces of equal magnitude are applied to a \(3 \, \text{m} \times 2 \, \text{m}\) rectangle. Force \(F_1\) and \(F_2\) act at \(45^\circ\) angles to the vertical as shown, while \(F_3\) acts horizontally.
In short:
\(F_1\): applied at \((0, -2)\), direction SW \(45^\circ\)
\(F_2\): applied at \((2, -2)\), direction NW \(45^\circ\)
\(F_3\): applied at \((3, -1)\), direction east
Points of rotation: \(A = (0, 0)\), \(B = (0, -1)\), \(C = (1, -1)\)
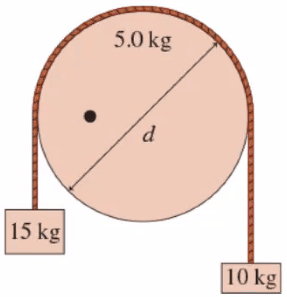
The axle (the black dot) in Figure 1 is half the distance from the center to the rim. Suppose \( d = 30 \) \( \text{cm} \). What is the torque that the axle must apply to prevent the disk from rotating? Express your answer in newton-meters. Use positive value for the counterclockwise torque and negative value for the clockwise torque.



