
A massless rigid rod of length [katex]3d[/katex] is pivoted at a fixed point [katex]W[/katex], and two forces each of magnitude [katex]F[/katex] are applied vertically upward as shown above. A third vertical force of magnitude [katex]F[/katex] may be applied, either upward or downward, at one of the labeled points. With the proper choice of direction at each point, the rod can be in equilibrium if the third force of magnitude [katex]F[/katex] is applied at point?
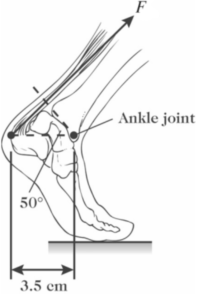
The figure shows a person’s foot. In that figure, the Achilles tendon exerts a force of magnitude F = 720 N. What is the magnitude of the torque that this force produces about the ankle joint?
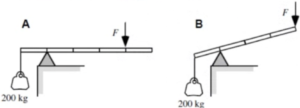
In both cases, a massless rod is supported by a fulcrum, and a \(200 \, \text{kg}\) hanging mass is suspended from the left end of the rod by a cable. A downward force \(F\) keeps the rod in rest. The rod in Case A is \(50 \, \text{cm}\) long, and the rod in Case B is \(40 \, \text{cm}\) long (each rod is marked at \(10 \, \text{cm}\) intervals). The magnitude of each vertical force \(F\) exerted on the rod will be
 The figure above shows a uniform beam of length \( L \) and mass \( M \) that hangs horizontally and is attached to a vertical wall. A block of mass \( M \) is suspended from the far end of the beam by a cable. A support cable runs from the wall to the outer edge of the beam. Both cables are of negligible mass. The wall exerts a force \( F_w \) on the left end of the beam. For which of the following actions is the magnitude of the vertical component of \( F_w \) smallest?
The figure above shows a uniform beam of length \( L \) and mass \( M \) that hangs horizontally and is attached to a vertical wall. A block of mass \( M \) is suspended from the far end of the beam by a cable. A support cable runs from the wall to the outer edge of the beam. Both cables are of negligible mass. The wall exerts a force \( F_w \) on the left end of the beam. For which of the following actions is the magnitude of the vertical component of \( F_w \) smallest?
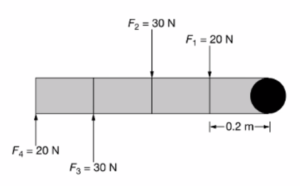
A rod may freely rotate about an axis that is perpendicular to the rod and is along the plane of the page. The rod is divided into four sections of equal length of 0.2 m each, and four forces are exerted on the rod, as shown in the figure. Frictional forces are considered negligible. Which of the following describes an additional torque that must be applied in order to keep the rod from rotating?



