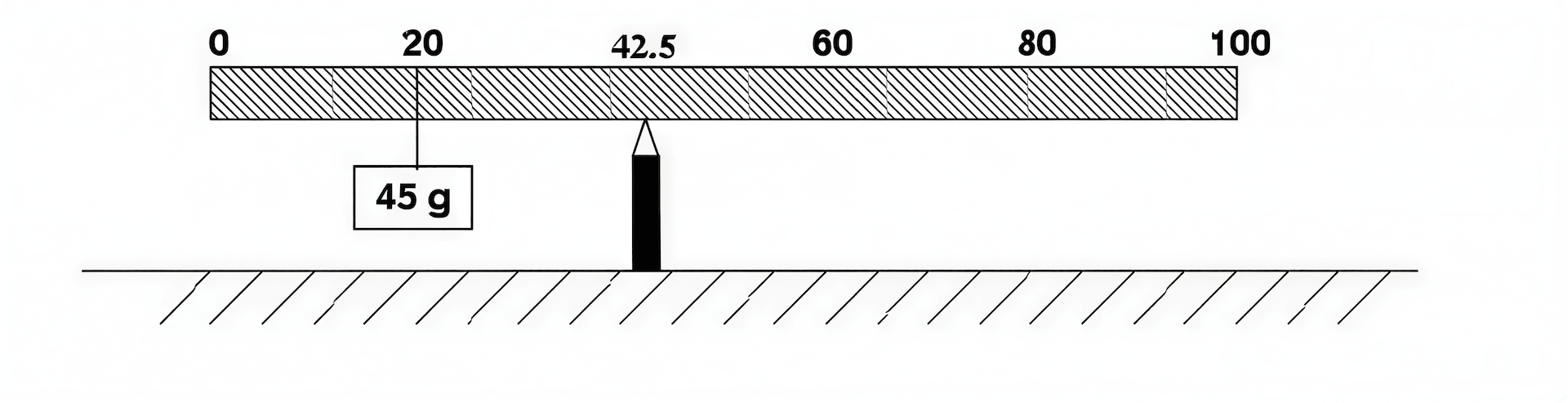
A uniform meter stick has a mass of \( 45.0 \) \( \text{g} \) placed at the \( 20 \) \( \text{cm} \) mark. If a pivot is placed at the \( 42.5 \) \( \text{cm} \) mark and the meter stick remains horizontal in static equilibrium, what is the mass of the meter stick?

A rod is initially at rest on a rough horizontal surface. Three forces are exerted on the rod with the magnitudes and directions shown in the figure. The force exerted in the center of the rod is an equidistant 0.5 m from both ends of the rod. If friction between the rod and the table prevents the rod from rotating, what is the magnitude of the torque exerted on the rod about its center from frictional forces?
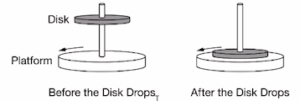
A platform is initially rotating on smooth ice with negligible friction, as shown above. A stationary disk is dropped directly onto the center of the platform. A short time later, the disk and platform rotate together at the same angular velocity, as shown at right in the figure. How does the angular momentum of only the platform change, if at all, after the disk drops? And what is the best justification.
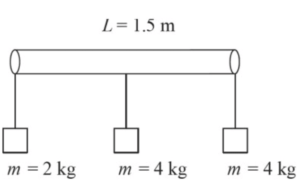
Three masses are attached to a \( 1.5 \, \text{m} \) long massless bar. Mass 1 is \( 2 \, \text{kg} \) and is attached to the far left side of the bar. Mass 2 is \( 4 \, \text{kg} \) and is attached to the far right side of the bar. Mass 3 is \( 4 \, \text{kg} \) and is attached to the middle of the bar. At what distance from the far left side of the bar can a string be attached to hold the bar up horizontally?



