
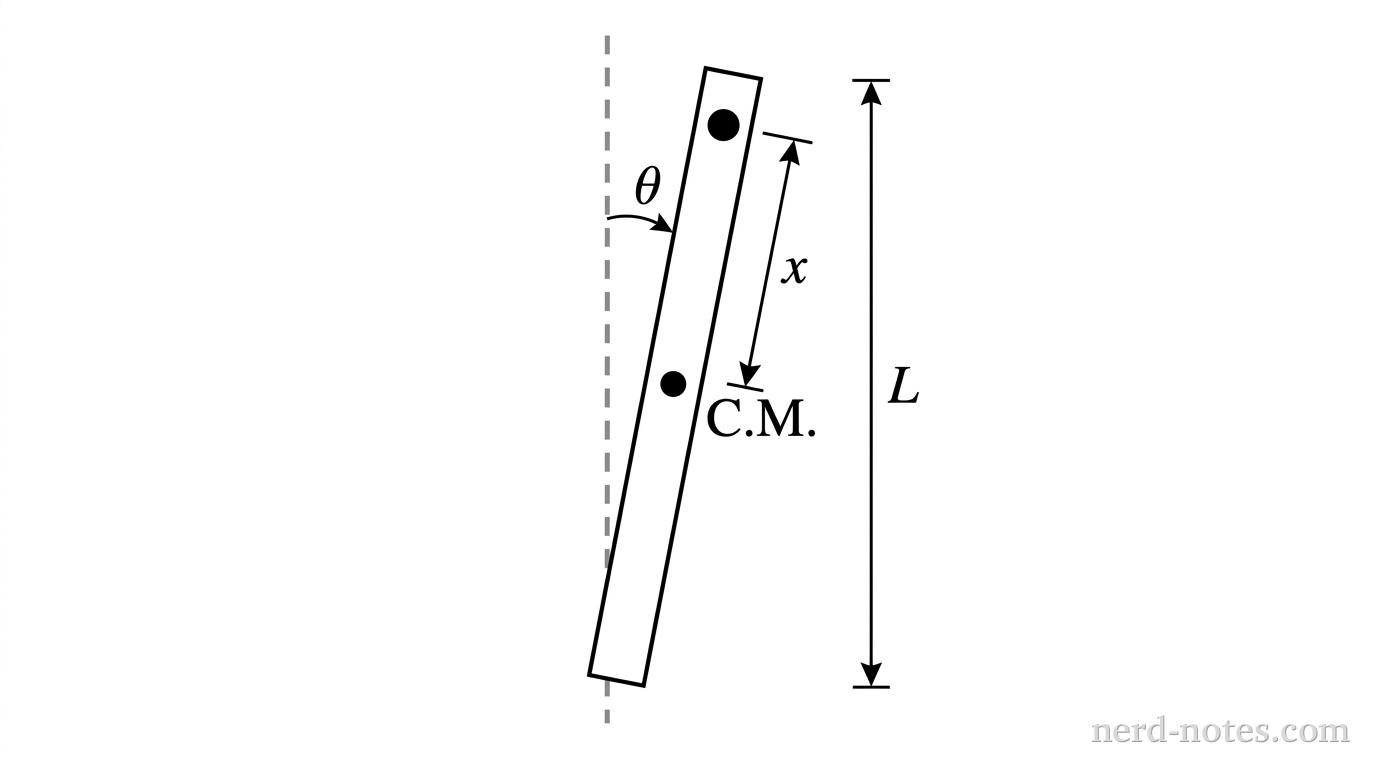
Students are investigating the periodic motion of a physical pendulum to determine the acceleration due to gravity \(g\). They are provided with a uniform rigid rod of length \(L = 1.20 \text{ m}\) and mass \(M\). The rod has several small holes drilled along its length, allowing it to be pivoted about a frictionless axle. The distance from the center of mass of the rod to the pivot is \(x\).
When displaced by a small angle \(\theta\) and released, the rod oscillates. The theoretical period of oscillation \(T\) is given by the equation:
\[ T = 2\pi \sqrt{ \dfrac{\dfrac{1}{12}L^2 + x^2}{gx} } \]
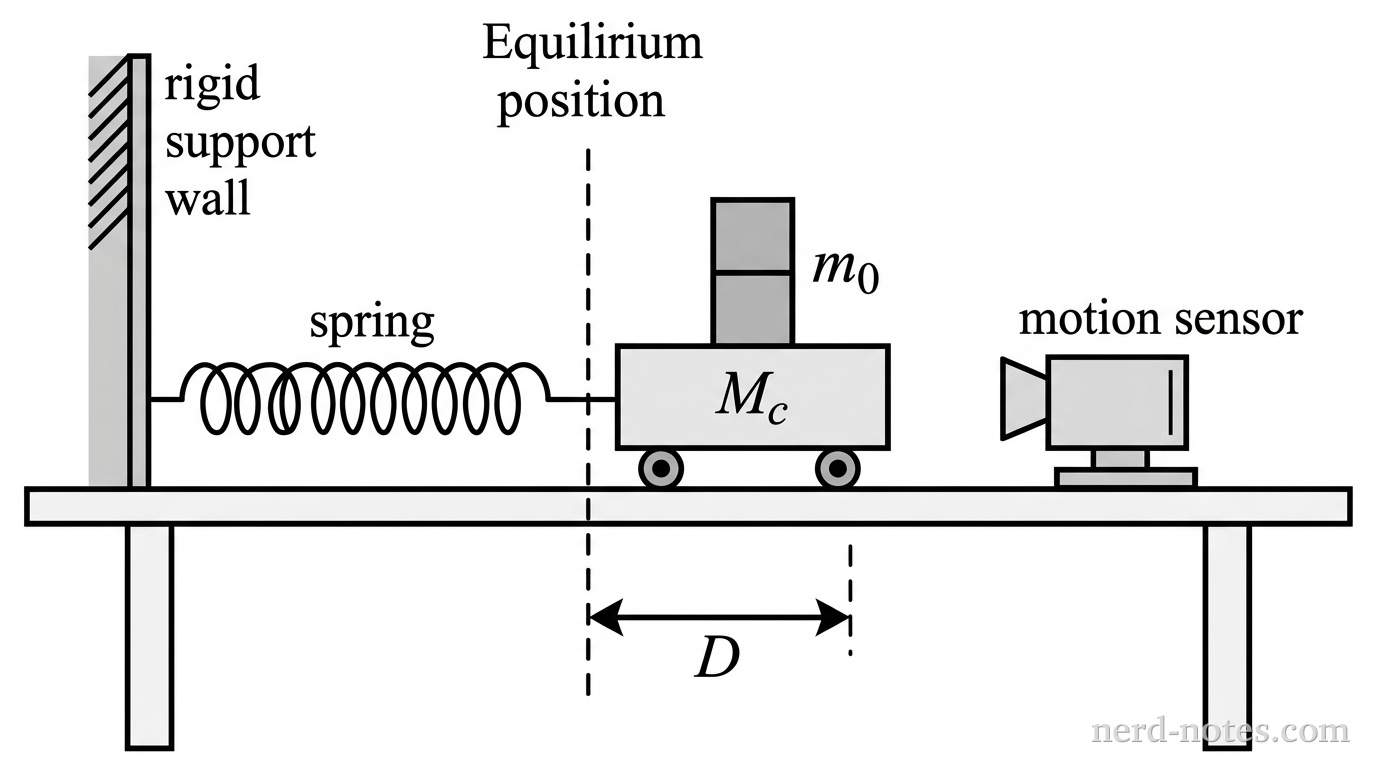
A group of students is investigating the properties of a horizontal spring system. A cart of known mass \(M_c\) is attached to an ideal horizontal spring of unknown spring constant \(k\). The other end of the spring is attached to a fixed rigid wall. The cart rolls on a horizontal track with negligible friction. A motion sensor is positioned at the far end of the track to measure the speed of the cart. The students are provided with a set of identical metal blocks, each of known mass \(m_0\), which can be securely attached to the top of the cart. The students can pull the cart to stretch the spring by a distance \(D\) from its equilibrium position before releasing it from rest.
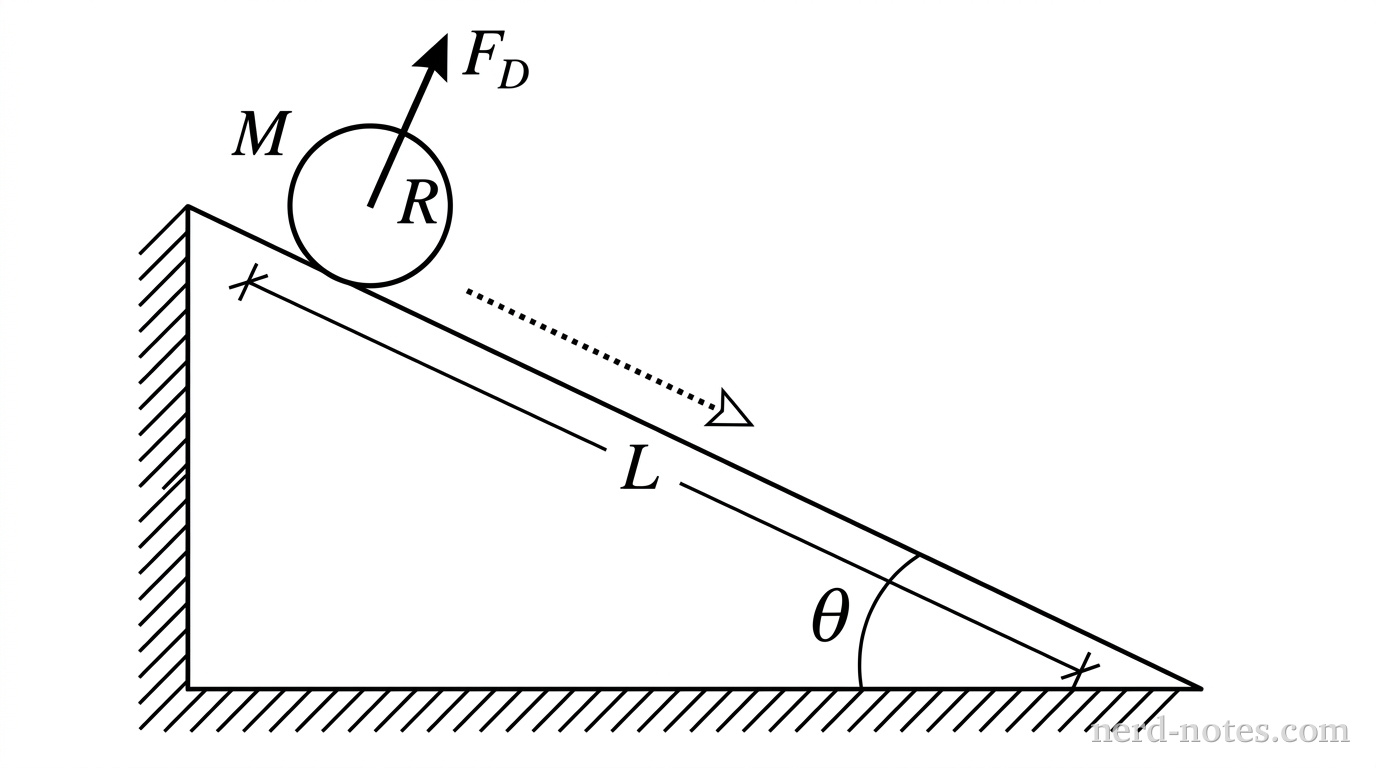
A solid cylinder of mass \(M\) and radius \(R\) is released from rest at the top of an incline of length \(L\) that makes an angle \(\theta\) with the horizontal, as shown in Figure 1. The cylinder rolls down the incline without slipping. As the cylinder moves, the air exerts a constant drag force of magnitude \(F_D\) on the cylinder, directed opposite to its velocity. The drag force acts entirely at the center of mass of the cylinder. The rotational inertia of a solid cylinder is \(I = \dfrac{1}{2}MR^2\).
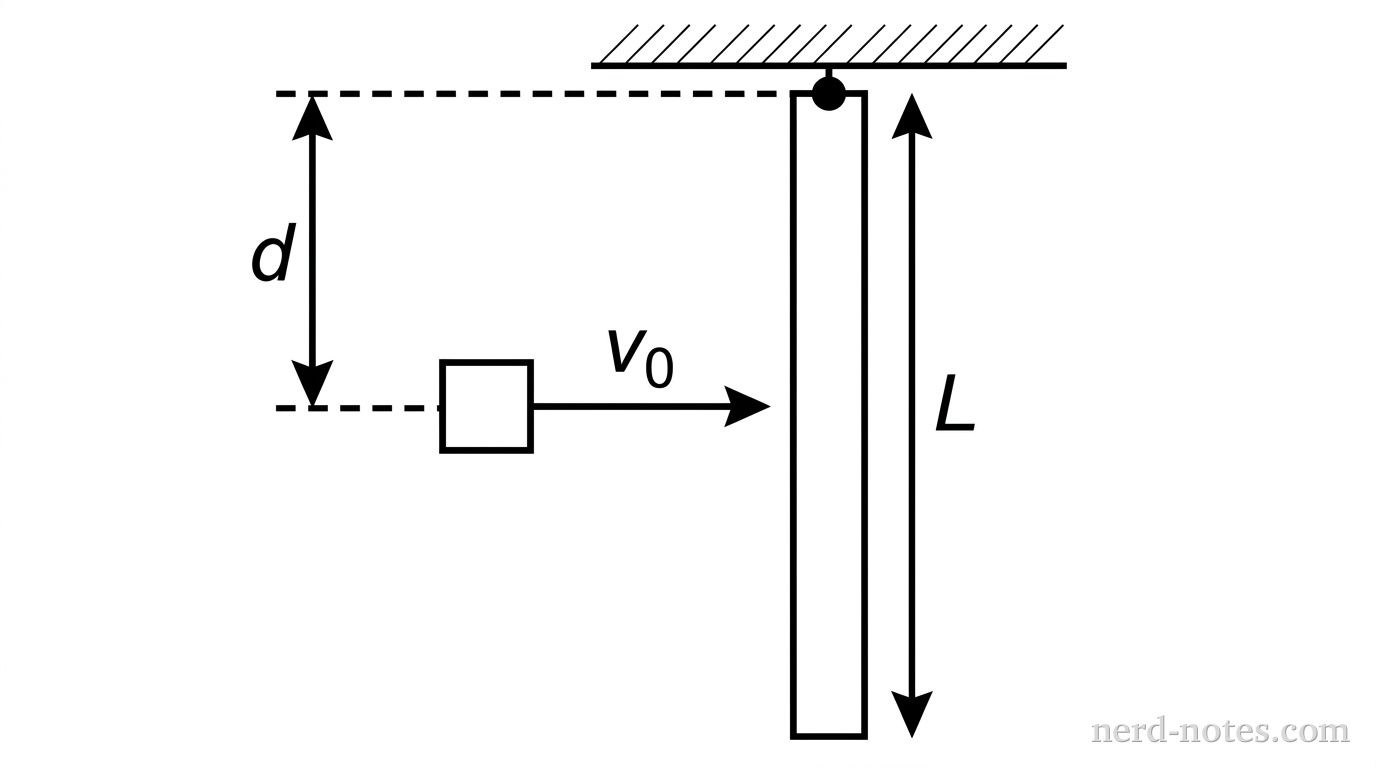
A uniform rigid rod of mass \( M \) and length \( L \) hangs at rest from a fixed, frictionless pivot at its top end. A small block of mass \( m \) is sliding horizontally with speed \( v_0 \) toward the rod. The block strikes the rod at a distance \( d \) below the pivot and sticks to it. The rotational inertia of the rod about the pivot is \( \dfrac{1}{3}ML^2 \).
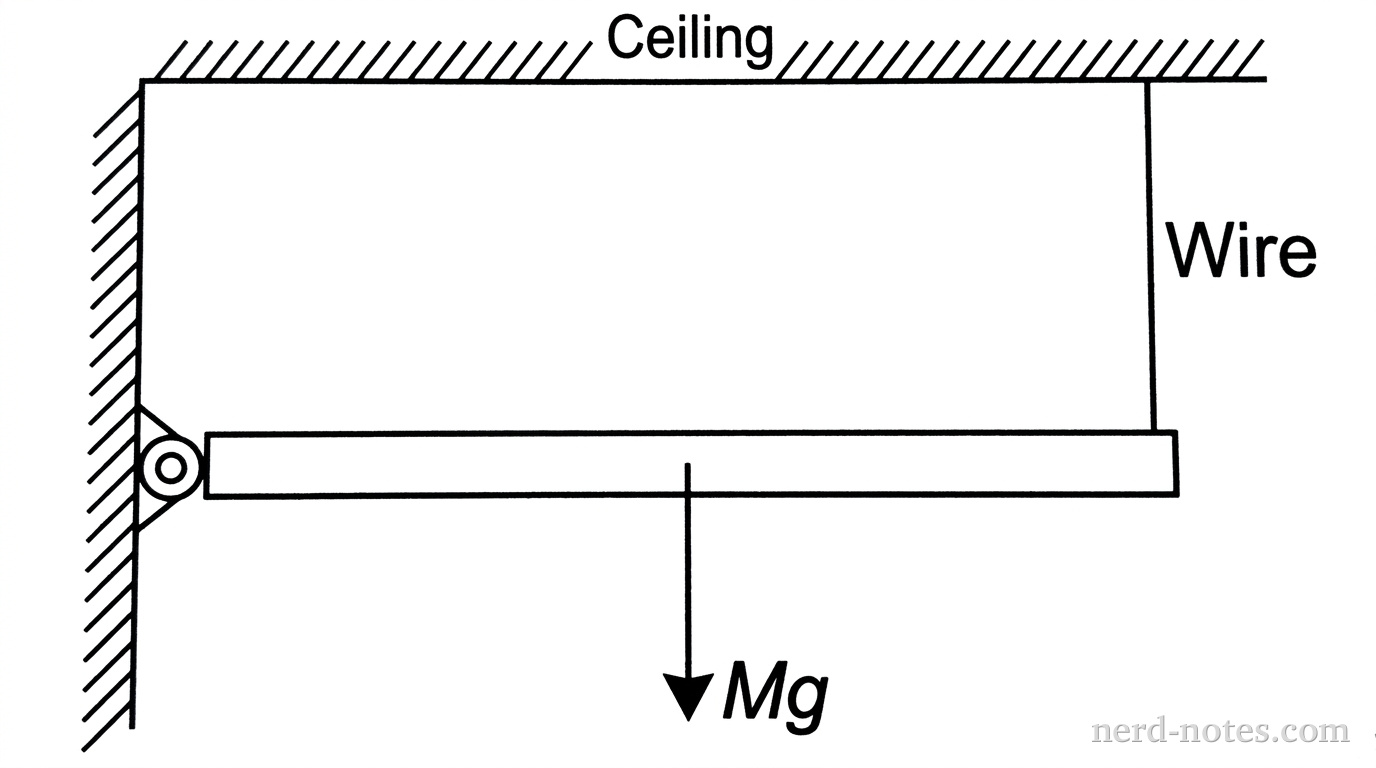
A uniform horizontal shelf of mass M is attached to a vertical wall by a hinge at its left end and is supported by a vertical wire at its right end. A student intends to use the rotational equilibrium condition \(\sum \tau = 0\) to determine the magnitude of the tension in the wire. The student knows the mass of the shelf but does not know the magnitude or direction of the force exerted by the hinge on the shelf. Which of the following describes the most useful location for the axis of rotation and provides a correct justification?
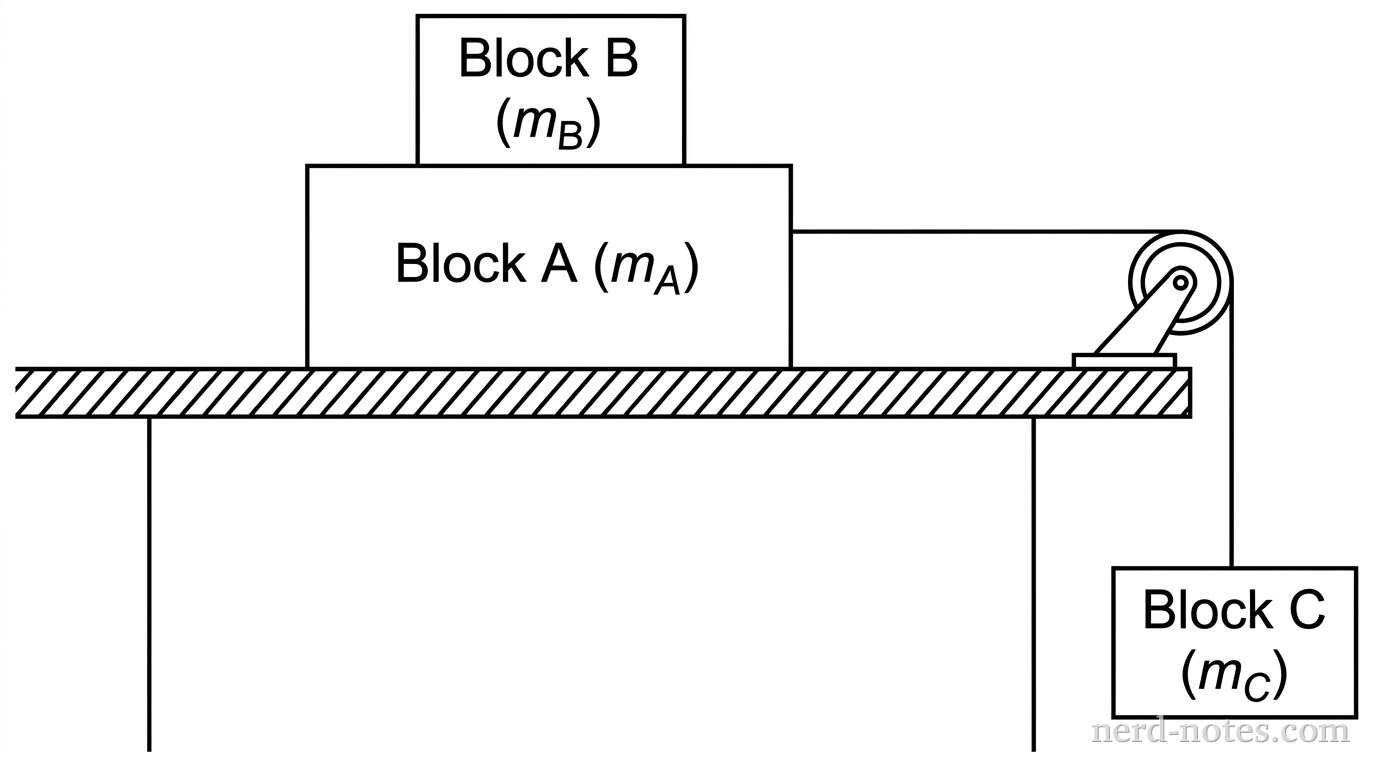
Block \(A\) of mass \(m_A\) rests on a rough horizontal table. Block \(B\) of mass \(m_B\) rests on top of Block \(A\). A light, inextensible string is attached to Block \(A\), passes over an ideal pulley at the edge of the table, and is attached to Block \(C\) of mass \(m_C\), which hangs vertically, as shown in Figure 1.
The coefficient of kinetic friction between Block \(A\) and the table is \(\mu_k\). The coefficient of static friction between Block \(A\) and Block \(B\) is \(\mu_s\). The system is released from rest, and Block \(B\) moves along with Block \(A\) without slipping. Assume air resistance is negligible.
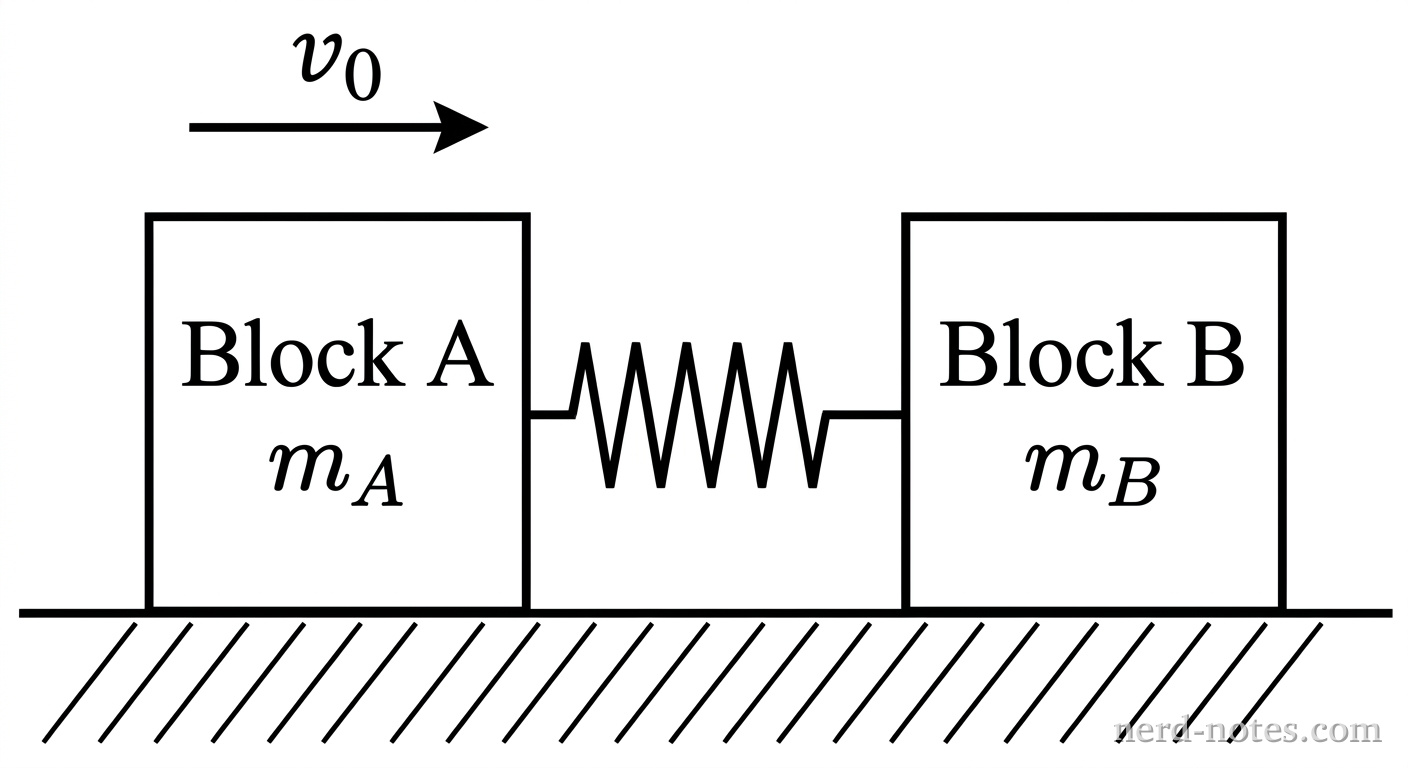
Block A of mass \(m_A\) is traveling at speed \(v_0\) to the right on a horizontal, frictionless surface. An ideal, massless spring of spring constant \(k\) is attached to the right face of Block A. Block B of mass \(m_B\) is initially at rest on the surface. Block A collides with Block B, compressing the spring.
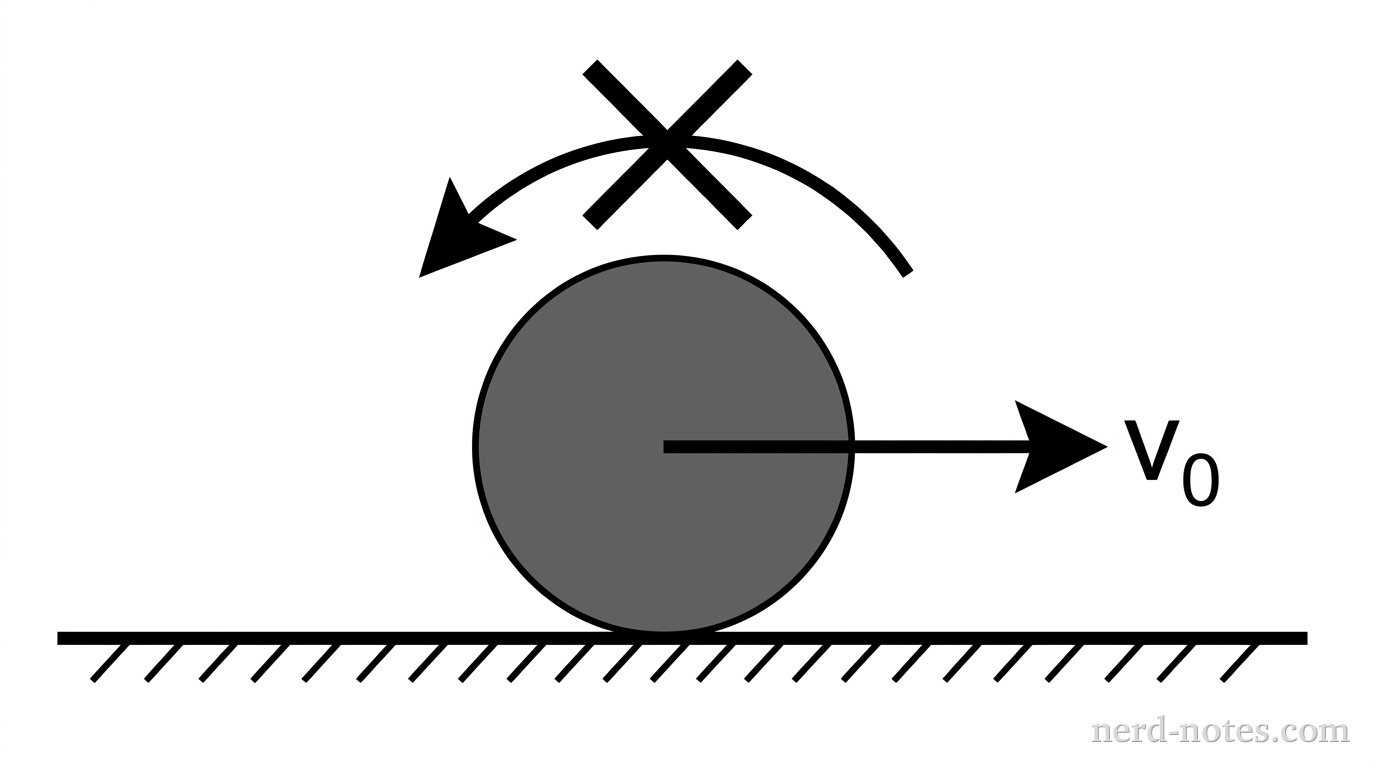
A solid sphere is launched across a rough horizontal surface with an initial translational velocity \(v_0\) to the right and zero initial angular velocity. As the sphere moves, the frictional force from the surface causes the sphere’s translational speed to decrease and its angular speed to increase until it eventually rolls without slipping. Which of the following correctly identifies the type and direction of the frictional force exerted by the surface on the sphere while it is sliding before it begins to roll without slipping?
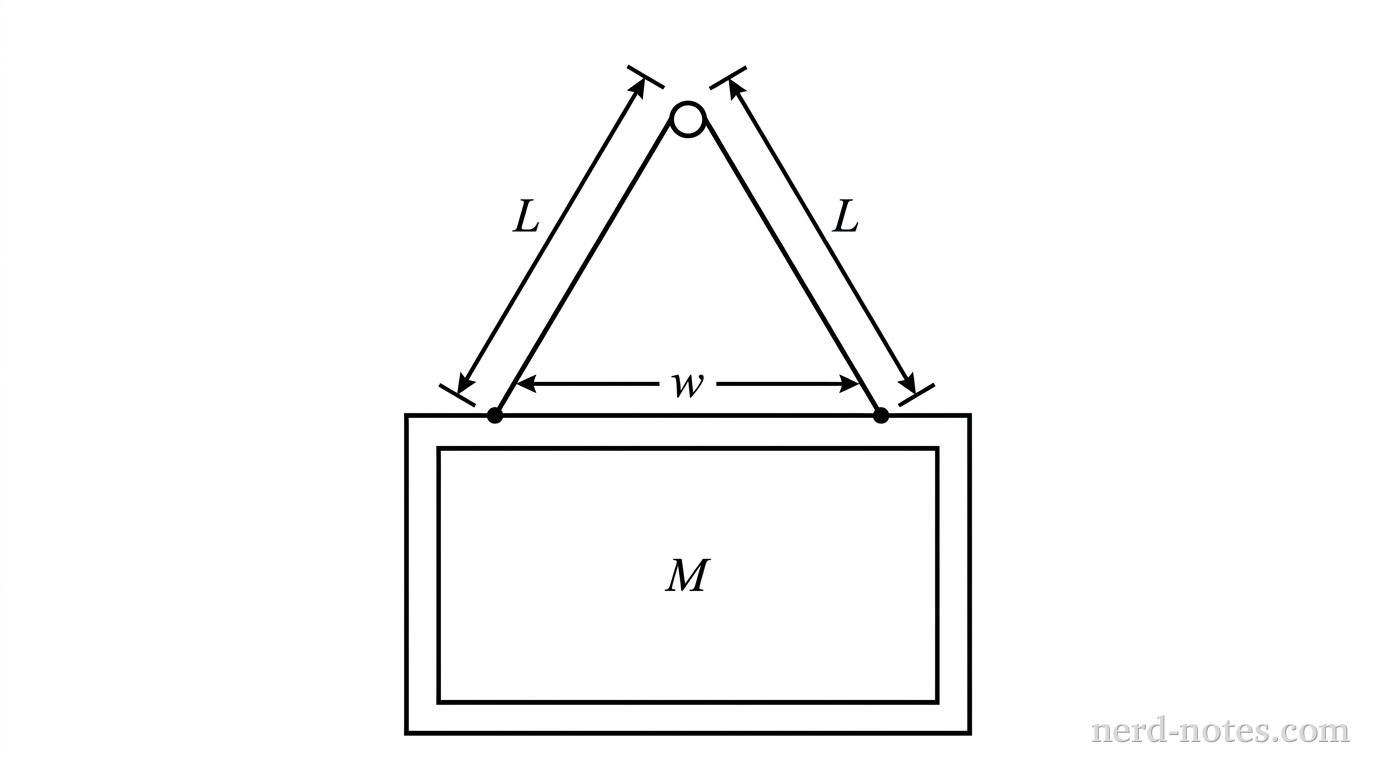
A picture frame of mass Equivalence mass is suspended from a small, frictionless peg by a light, non-stretchable wire of total length \(L\). The ends of the wire are attached to two points at the top corners of the frame that are a distance \(w\) apart. The peg is positioned such that the two wire segments are of equal length and the system is in static equilibrium.
Which of the following expressions correctly represents the tension in the wire?
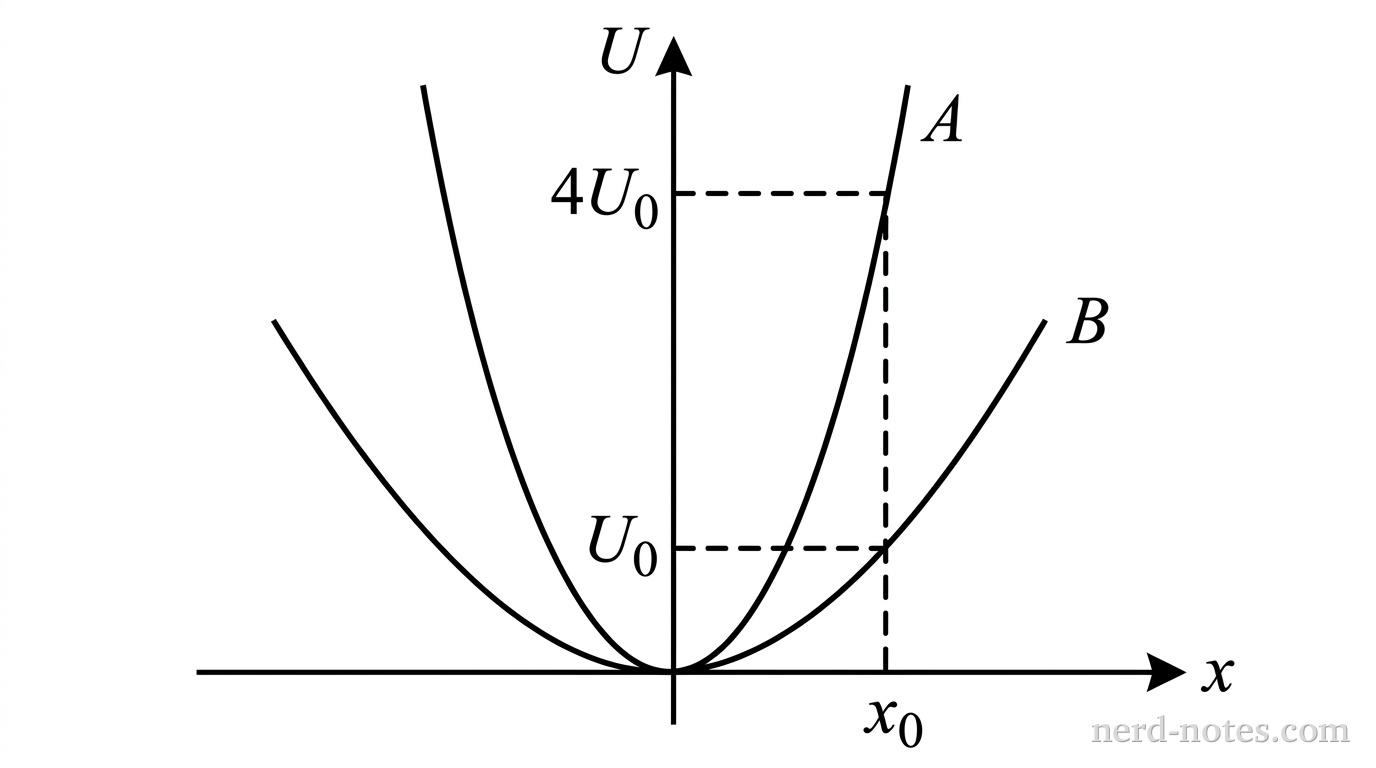
Two different spring-mass systems, A and B, oscillate in simple harmonic motion on a horizontal, frictionless surface. The potential energy \(U\) of each system as a function of displacement \(x\) from equilibrium is shown in the graph. The mass of the block in system B is twice the mass of the block in system A (\(m_B = 2m_A\)). What is the ratio \(T_B / T_A\) of the periods of the two systems?



