
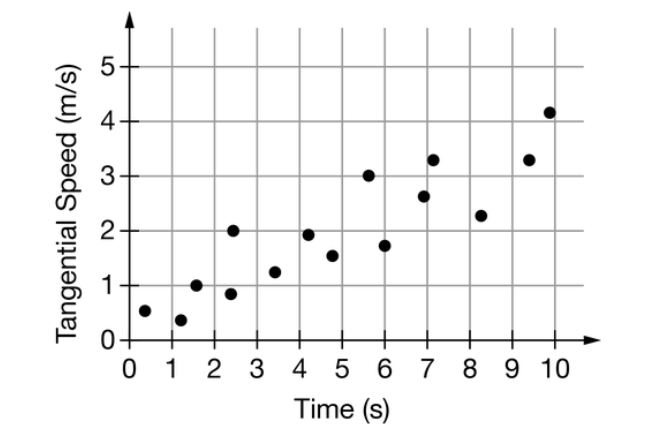
In an experiment, an external torque is applied to the edge of a disk of radius \( 0.5 \) \( \text{m} \) such that the edge of the disk speeds up as it continues to rotate. The tangential speed as a function of time is shown for the edge of the disk. The rotational inertia of the disk is \( 0.125 \) \( \text{kg} \cdot \text{m}^2 \). Can a student use the graph and the known information to calculate the net torque exerted on the edge of the disk?
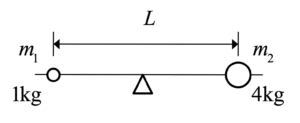
A \( 4 \)-\( \text{kg} \) ball and a \( 1 \)-\( \text{kg} \) ball are positioned a distance \( L \) apart on a bar of negligible mass. How far from the \( 4 \)-\( \text{kg} \) mass should the fulcrum be placed to balance the bar?
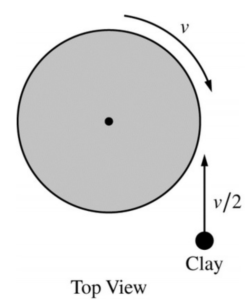
A system consists of a disk rotating on a frictionless axle and a piece of clay moving toward it, as shown in the figure above. The outside edge of the disk is moving at a linear speed \( v \), and the clay is moving at speed \( \frac{v}{2} \). The clay sticks to the outside edge of the disk. How does the angular momentum of the system after the clay sticks compare to the angular momentum of the system before the clay sticks, and what is an explanation for the comparison?



