

Two spheres of equal size and equal mass are rotated with an equal amount of torque. One of the spheres is solid with its mass evenly distributed throughout its volume, and the other is hollow with all of its mass concentrated at the edges. Which sphere would rotate faster if the same amount of torque is applied for the same period of time for both?
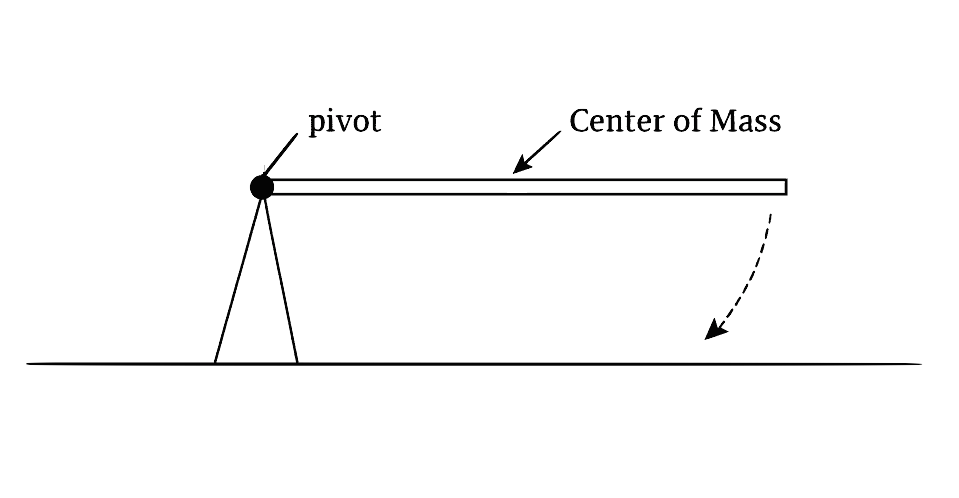
A uniform rod of length \( L \) and mass \( M \) is free to rotate about one end, as shown in the diagram. The free end is released from rest at a horizontal position, as shown. The pivot point is supported by a stand so that only the free end can move. The moment of inertia of a rod about its end is \(\tfrac{1}{3} M L^{2}\).
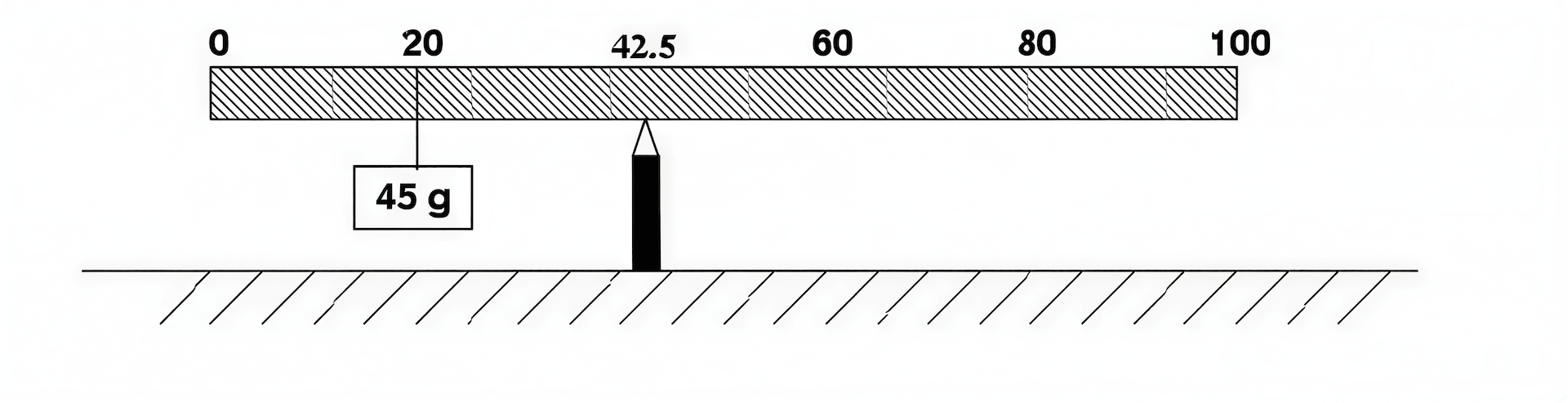
A uniform meter stick has a mass of \( 45.0 \) \( \text{g} \) placed at the \( 20 \) \( \text{cm} \) mark. If a pivot is placed at the \( 42.5 \) \( \text{cm} \) mark and the meter stick remains horizontal in static equilibrium, what is the mass of the meter stick?

A meter stick with a uniformly distributed mass of \(0.5 \, \text{kg}\) is supported by a pivot placed at the \(0.25 \, \text{m}\) mark from the left. At the left end, a small object of mass \(1.0 \, \text{kg}\) is placed at the zero mark, and a second small object of mass \(0.5 \, \text{kg}\) is placed at the \(0.5 \, \text{m}\) mark. The meter stick is supported so that it remains horizontal, and then it is released from rest. Find the change in the angular momentum of the meter stick, one second after it is released.
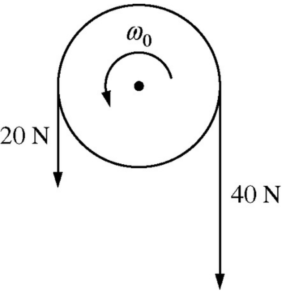
A disk is initially rotating counterclockwise around a fixed axis with angular speed \( \omega_0 \). At time \( t = 0 \), the two forces shown in the figure above are exerted on the disk. If counterclockwise is positive, which of the following could show the angular velocity of the disk as a function of time?
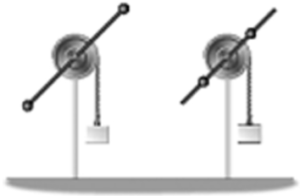
The rotating systems, shown in the figure above, differ only in that the two identical movable masses are positioned a distance r from the axis of rotation (left), or a distance r/2 from the axis of rotation (right). What happens if you release the hanging blocks simultaneously from rest?



