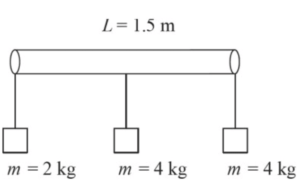
Three masses are attached to a \( 1.5 \, \text{m} \) long massless bar. Mass 1 is \( 2 \, \text{kg} \) and is attached to the far left side of the bar. Mass 2 is \( 4 \, \text{kg} \) and is attached to the far right side of the bar. Mass 3 is \( 4 \, \text{kg} \) and is attached to the middle of the bar. At what distance from the far left side of the bar can a string be attached to hold the bar up horizontally?
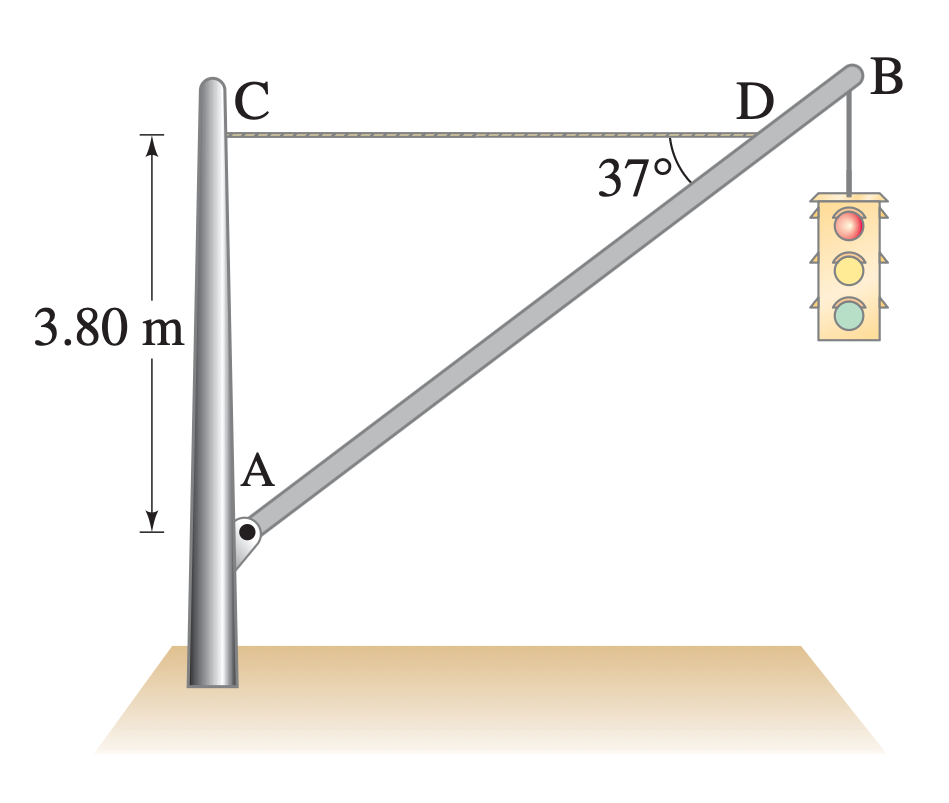
A traffic light hangs from a pole as shown in the diagram. The uniform aluminum pole AB is of length \( 7.20 \) \( \text{m} \) and has a mass of \( 12.0 \) \( \text{kg} \). The mass of the traffic light is \( 21.5 \) \( \text{kg} \). The point C is located \( 3.80 \) \( \text{m} \) vertically above the pivot A. A massless horizontal cable CD is attached at C and connects to the pole at point D, where the pole makes an angle of \( 37^{\circ} \) with the cable.

A massless rigid rod of length [katex]3d[/katex] is pivoted at a fixed point [katex]W[/katex], and two forces each of magnitude [katex]F[/katex] are applied vertically upward as shown above. A third vertical force of magnitude [katex]F[/katex] may be applied, either upward or downward, at one of the labeled points. With the proper choice of direction at each point, the rod can be in equilibrium if the third force of magnitude [katex]F[/katex] is applied at point?
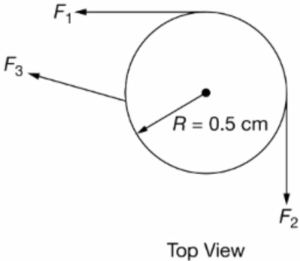
A disk of radius \( R = 0.5 \) \( \text{cm} \) rests on a flat, horizontal surface such that frictional forces are considered to be negligible. Three forces of unknown magnitude are exerted on the edge of the disk, as shown in the figure. Which of the following lists the essential measuring devices that, when used together, are needed to determine the change in angular momentum of the disk after a known time of \( 5.0 \) \( \text{s} \)?
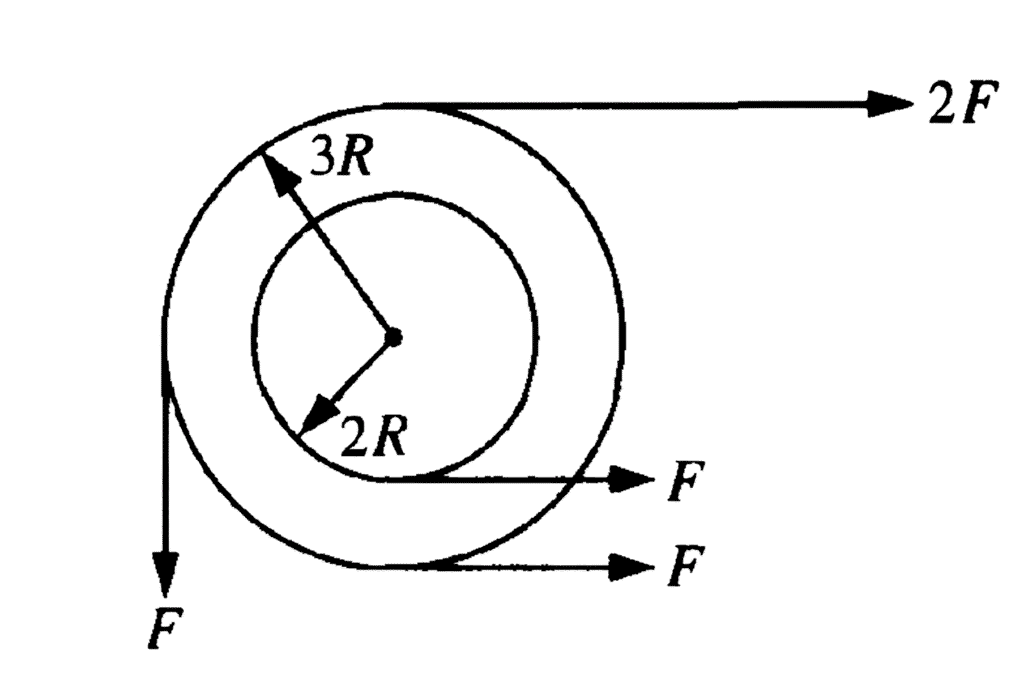
A system of two wheels fixed to each other is free to rotate about a frictionless axis through the common center of the wheels and perpendicular to the page. Four forces are exerted tangentially to the rims of the wheels, as shown in the figure. The magnitude of the net torque on the system about the axis is

A rod is initially at rest on a rough horizontal surface. Three forces are exerted on the rod with the magnitudes and directions shown in the figure. The force exerted in the center of the rod is an equidistant 0.5 m from both ends of the rod. If friction between the rod and the table prevents the rod from rotating, what is the magnitude of the torque exerted on the rod about its center from frictional forces?
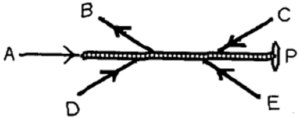
Five forces act on a rod that is free to pivot at point \( P \), as shown in the figure. Which of these forces is producing a counter-clockwise torque about point \( P \)?
 The figure above shows a uniform beam of length \( L \) and mass \( M \) that hangs horizontally and is attached to a vertical wall. A block of mass \( M \) is suspended from the far end of the beam by a cable. A support cable runs from the wall to the outer edge of the beam. Both cables are of negligible mass. The wall exerts a force \( F_w \) on the left end of the beam. For which of the following actions is the magnitude of the vertical component of \( F_w \) smallest?
The figure above shows a uniform beam of length \( L \) and mass \( M \) that hangs horizontally and is attached to a vertical wall. A block of mass \( M \) is suspended from the far end of the beam by a cable. A support cable runs from the wall to the outer edge of the beam. Both cables are of negligible mass. The wall exerts a force \( F_w \) on the left end of the beam. For which of the following actions is the magnitude of the vertical component of \( F_w \) smallest?



