
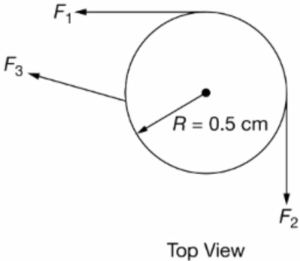
A disk of radius \( R = 0.5 \) \( \text{cm} \) rests on a flat, horizontal surface such that frictional forces are considered to be negligible. Three forces of unknown magnitude are exerted on the edge of the disk, as shown in the figure. Which of the following lists the essential measuring devices that, when used together, are needed to determine the change in angular momentum of the disk after a known time of \( 5.0 \) \( \text{s} \)?

In lacrosse, a typical throw is made by rotating the stick through an angle of roughly \(90^\circ\), then releasing the ball when the stick is vertical, as shown above. If the \(1 \, \text{meter}\) long stick is at rest when horizontal and the ball leaves the stick with a velocity of \(10 \, \text{m/s}\), what angular acceleration must the stick experience?
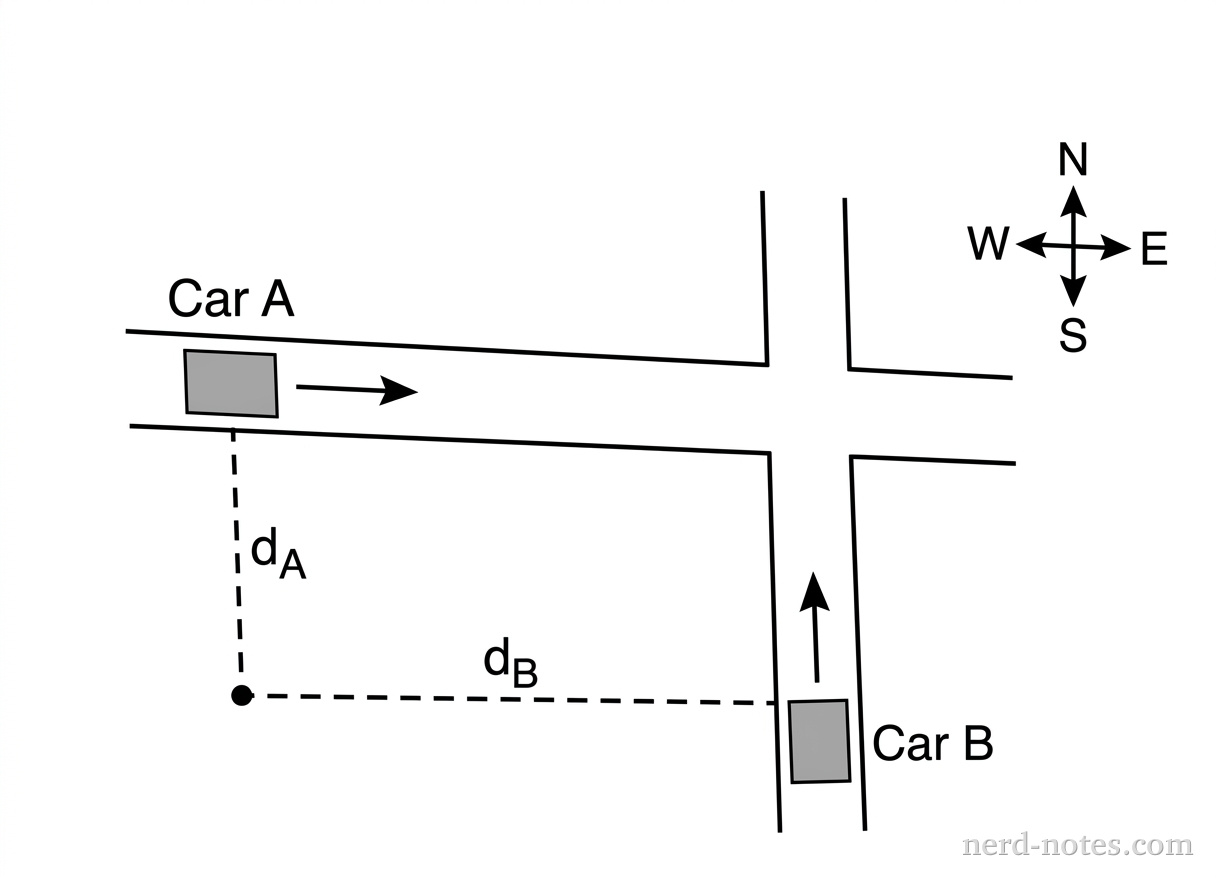
Car A of mass \( m_A \) is moving to the east along a straight road. Car B of mass \( m_B \) is moving to the north along another straight road. At the instant \( t = 0 \) shown in the figure, both cars are at their closest point to a flagpole, with Car A a distance \( d_A \) from the flagpole and Car B a distance \( d_B \) from the flagpole. The cars continue, each moving with constant speed, and reach the intersection of the two roads at time \( t = t_f \). Which of the following correctly expresses the magnitude of the total angular momentum of the two-car system about the flagpole at time \( t = 0 \)?



