
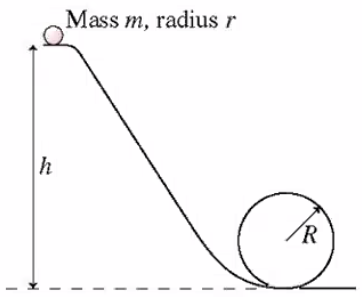
In the figure above, the marble rolls down the track and around a loop-the-loop of radius \( R \). The marble has mass \( m \) and radius \( r \). What minimum height \( h_{min} \) must the track have for the marble to make it around the loop-the-loop without falling off? Express your answer in terms of the variables \( R \) and \( r \).
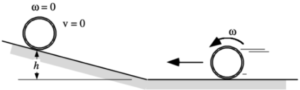
A hoop with a mass \(m\) and unknown radius is rolling without slipping on a flat surface with an angular speed \(\omega\). The hoop encounters a hill and continues to roll without slipping until it reaches a maximum height \(h\).
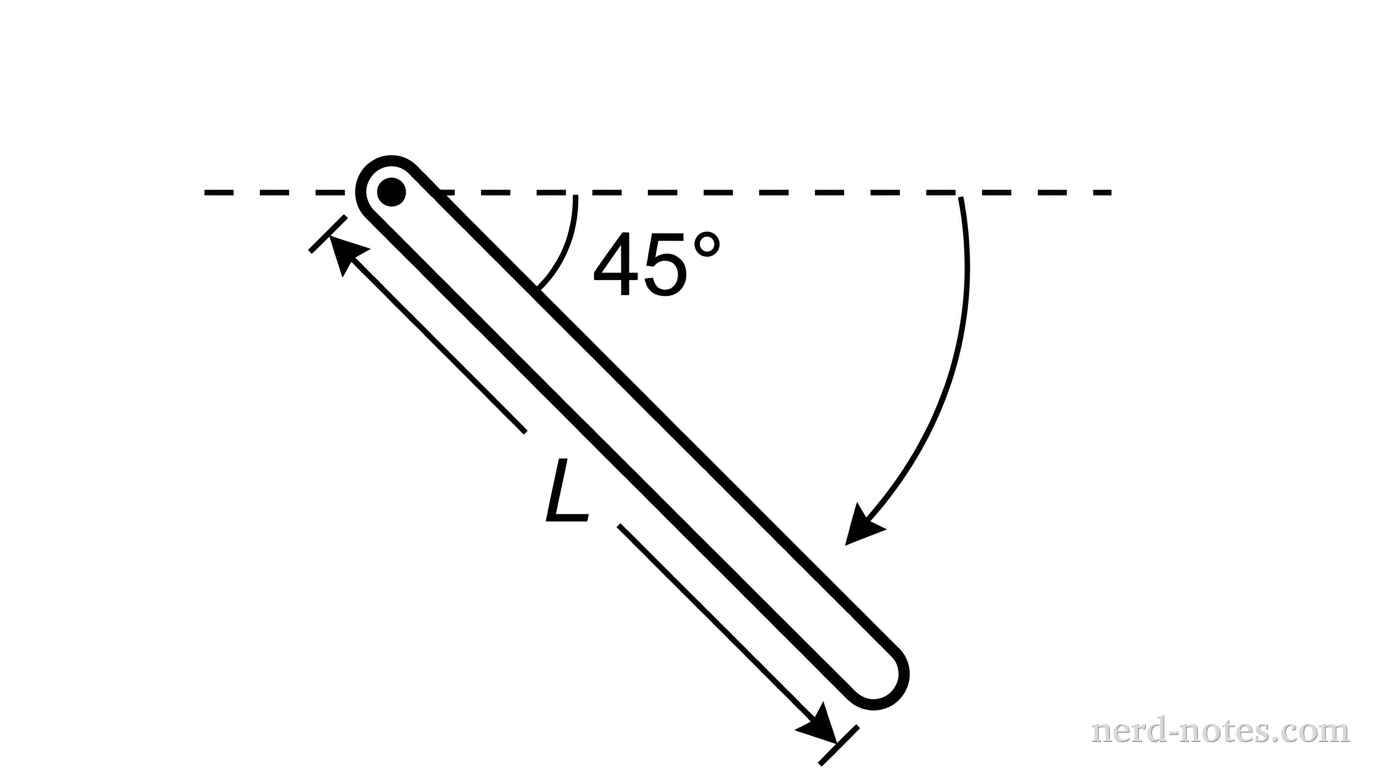
A uniform rod of length \( L \) is pivoted at one end \(45^{\circ}\) below the horizontal and released from rest. The rod swings freely downward. Which of the following best describes the angular acceleration of the rod as it swings from the initial position to the vertical position?
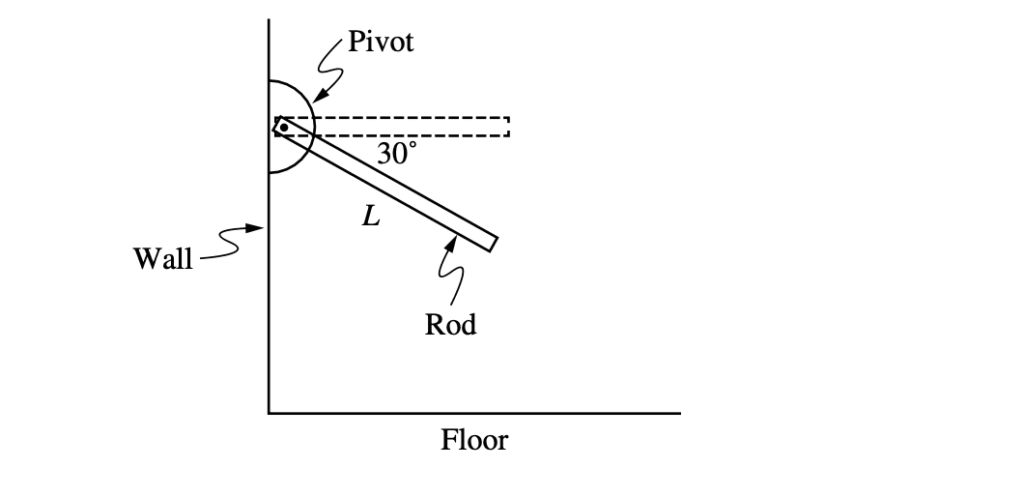
A uniform rod of mass \( M_0 \) and length \( L \) is free to rotate about a pivot at its left end and is released from rest when the rod is \( 30^{\circ} \) below the horizontal, as shown in the figure. With respect to the pivot, the rod has rotational inertia \( I_0 = \dfrac{1}{3} M_0 L^2 \). Which of the following expressions correctly represents the magnitude of the net torque exerted on the rod about the pivot at the moment the rod is released?



