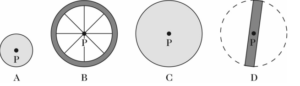
The figure shows scale drawings of four objects, each of the same mass and uniform thickness, with the mass distributed uniformly. Which one has the greatest moment of inertia when rotated about an axis perpendicular to the plane of the drawing at point P?
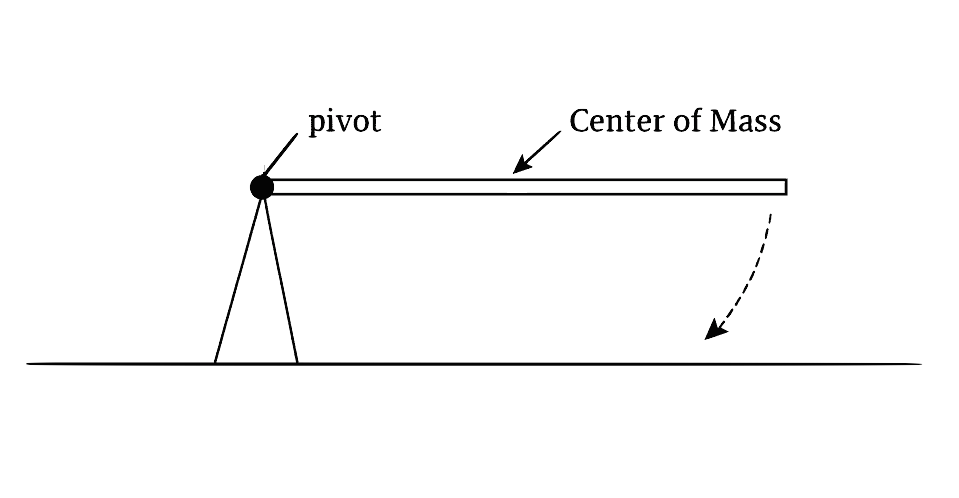
A uniform rod of length \( L \) and mass \( M \) is free to rotate about one end, as shown in the diagram. The free end is released from rest at a horizontal position, as shown. The pivot point is supported by a stand so that only the free end can move. The moment of inertia of a rod about its end is \(\tfrac{1}{3} M L^{2}\).
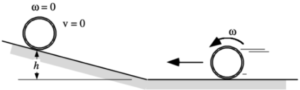
A hoop with a mass [katex]m[/katex] and unknown radius is rolling without slipping on a flat surface with an angular speed [katex]\omega[/katex]. The hoop encounters a hill and continues to roll without slipping until it reaches a maximum height [katex]h[/katex].



