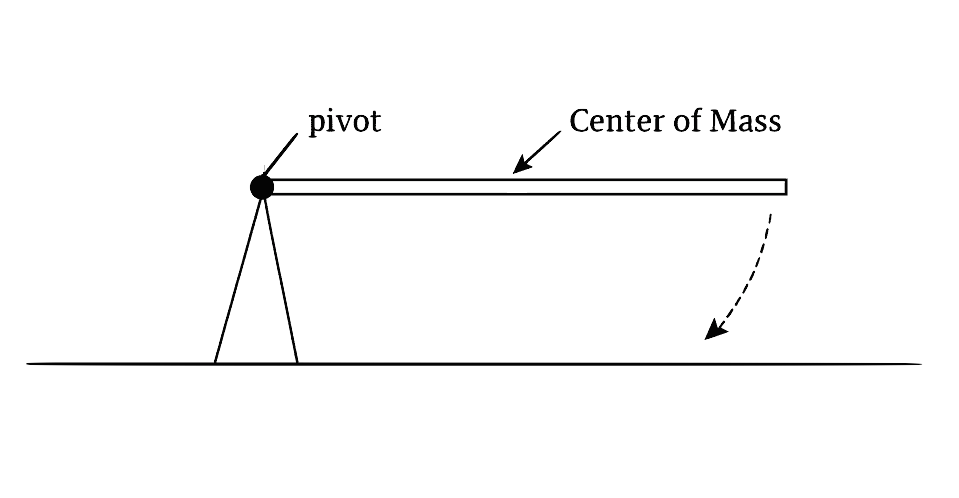
A uniform rod of length \( L \) and mass \( M \) is free to rotate about one end, as shown in the diagram. The free end is released from rest at a horizontal position, as shown. The pivot point is supported by a stand so that only the free end can move. The moment of inertia of a rod about its end is \(\tfrac{1}{3} M L^{2}\).
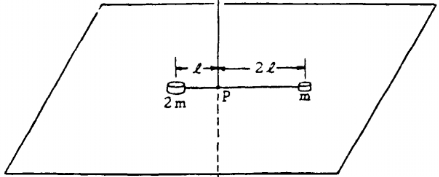
A system consists of two small disks, of masses \( m \) and \( 2m \), attached to a rod of negligible mass of length \( 3l \) as shown above. The rod is free to turn about a vertical axis through point \( P \). The two disks rest on a rough horizontal surface; the coefficient of friction between the disks and the surface is \( \mu \). At time \( t = 0 \), the rod has an initial counterclockwise angular velocity \( \omega_0 \) about \( P \). The system is gradually brought to rest by friction. Develop expressions for the following quantities in terms of \( \mu \), \( m \), \( l \), \( g \), and \( \omega_0 \).
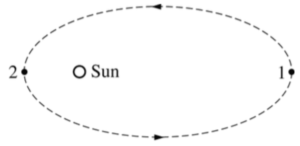
The elliptical orbit of a comet is shown above. Positions 1 and 2 are, respectively, the farthest and nearest positions to the Sun, and at position 1 the distance from the comet to the Sun is 10 times that at position 2. At position 2, the comet’s kinetic energy is



