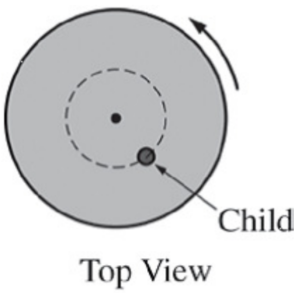
The diagram above shows a top view of a child of mass \(M\) on a circular platform of mass \(2M\) that is rotating counterclockwise. Assume the platform rotates without friction. Which of the following describes an action by the child that will increase the angular speed of the platform-child system and gives the correct reason why?
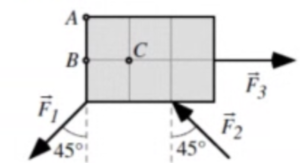
Three forces of equal magnitude are applied to a \( 3 \)-m by \( 2 \)-m rectangle. Force \( F_1 \) and \( F_2 \) act at \( 45^\circ \) angles to the vertical as shown, while \( F_3 \) acts horizontally.
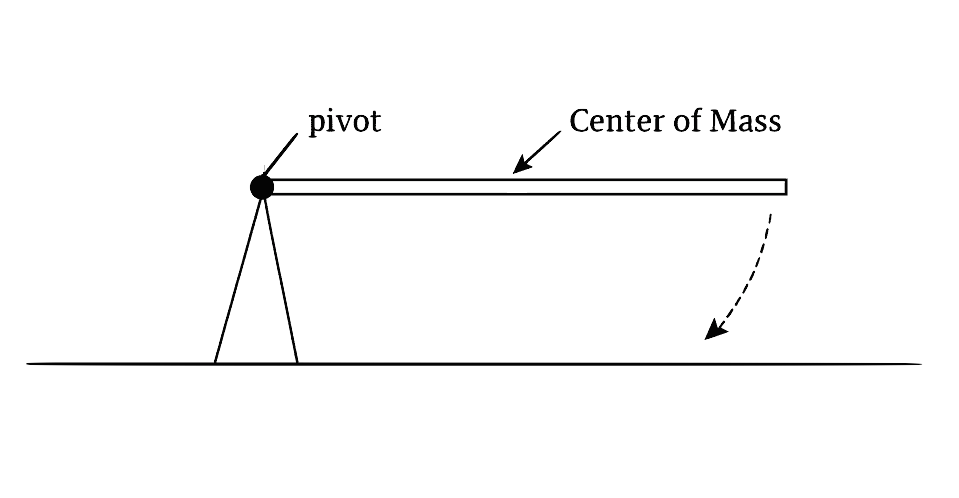
A uniform rod of length \( L \) and mass \( M \) is free to rotate about one end, as shown in the diagram. The free end is released from rest at a horizontal position, as shown. The pivot point is supported by a stand so that only the free end can move. The moment of inertia of a rod about its end is \(\tfrac{1}{3} M L^{2}\).
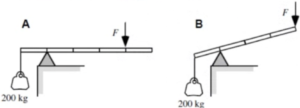
In both cases, a massless rod is supported by a fulcrum, and a \(200 \, \text{kg}\) hanging mass is suspended from the left end of the rod by a cable. A downward force \(F\) keeps the rod in rest. The rod in Case A is \(50 \, \text{cm}\) long, and the rod in Case B is \(40 \, \text{cm}\) long (each rod is marked at \(10 \, \text{cm}\) intervals). The magnitude of each vertical force \(F\) exerted on the rod will be



