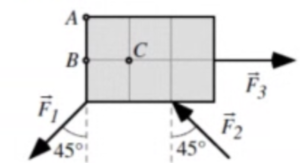
Three forces of equal magnitude are applied to a \( 3 \)-m by \( 2 \)-m rectangle. Force \( F_1 \) and \( F_2 \) act at \( 45^\circ \) angles to the vertical as shown, while \( F_3 \) acts horizontally.
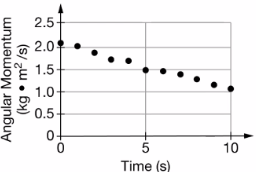
During the experiment, students collect data about the angular momentum of a rigid, uniform spinning wheel about an axle as a function of time, which was used to create the graph that is shown. A frictional torque is exerted on the wheel. A student makes the following statement about the data. “The frictional torque exerted on the wheel is independent of the wheel’s angular speed.” Does the data from the graph support the student’s statement? Justify your selection.
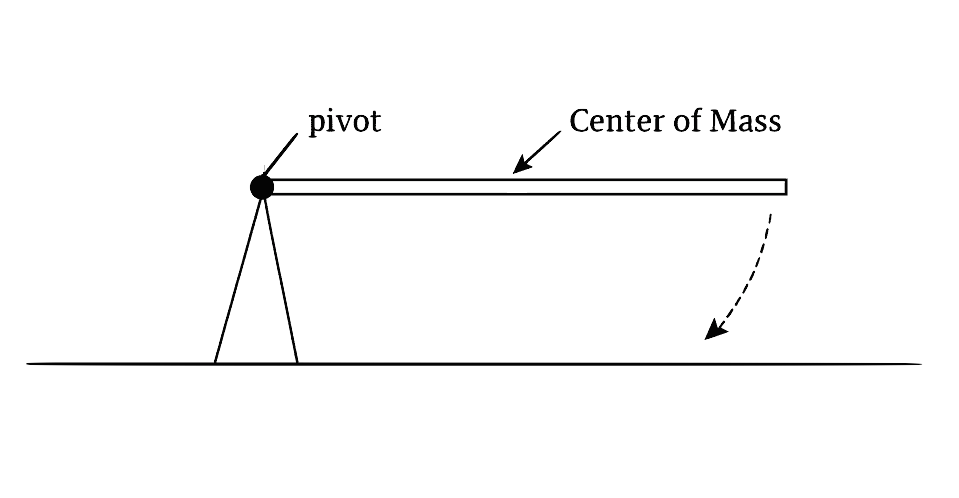
A uniform rod of length \( L \) and mass \( M \) is free to rotate about one end, as shown in the diagram. The free end is released from rest at a horizontal position, as shown. The pivot point is supported by a stand so that only the free end can move. The moment of inertia of a rod about its end is \(\tfrac{1}{3} M L^{2}\).

What is the net torque acting on the pivot supporting a \(10 \, \text{kilogram}\) beam \(2 \, \text{meters}\) long as shown above? Assume that the positive direction is clockwise.



