
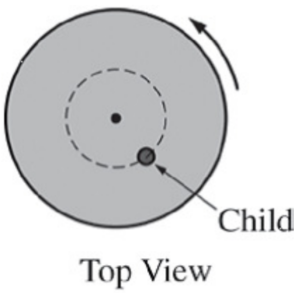
The diagram above shows a top view of a child of mass \(M\) on a circular platform of mass \(2M\) that is rotating counterclockwise. Assume the platform rotates without friction. Which of the following describes an action by the child that will increase the angular speed of the platform-child system and gives the correct reason why?
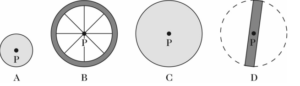
The figure shows scale drawings of four objects, each of the same mass and uniform thickness, with the mass distributed uniformly. Which one has the greatest moment of inertia when rotated about an axis perpendicular to the plane of the drawing at point P?
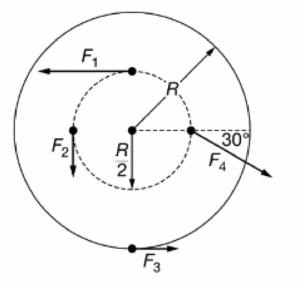
Four forces are exerted on a disk of radius \( R \) that is free to spin about its center, as shown above. The magnitudes are proportional to the length of the force vectors, where \( F_1 = F_4 \), \( F_2 = F_3 \), and \( F_1 = 2F_2 \). Which two forces combine to exert zero net torque on the disk?



