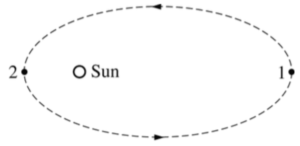
The elliptical orbit of a comet is shown above. Positions 1 and 2 are, respectively, the farthest and nearest positions to the Sun, and at position 1 the distance from the comet to the Sun is 10 times that at position 2. What is the ratio \(v_1\)/\(v_2\) of the speed of the comet at position 1 to the speed at position 2?

The graph above shows the angular velocity of a spinning wheel (radius = \( 25 \) \( \text{cm} \)) as a function of time.
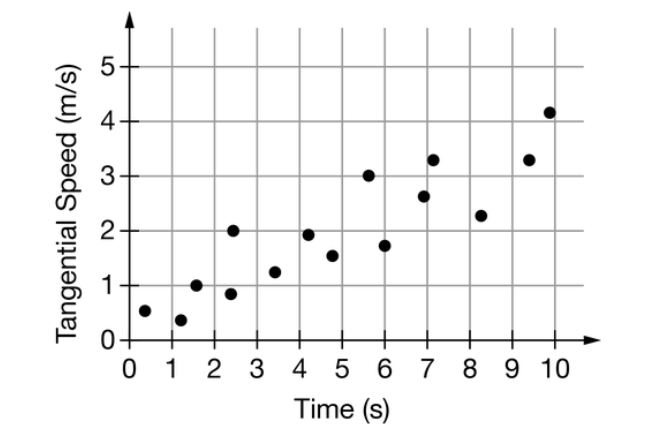
In an experiment, an external torque is applied to the edge of a disk of radius \( 0.5 \) \( \text{m} \) such that the edge of the disk speeds up as it continues to rotate. The tangential speed as a function of time is shown for the edge of the disk. The rotational inertia of the disk is \( 0.125 \) \( \text{kg} \cdot \text{m}^2 \). Can a student use the graph and the known information to calculate the net torque exerted on the edge of the disk?
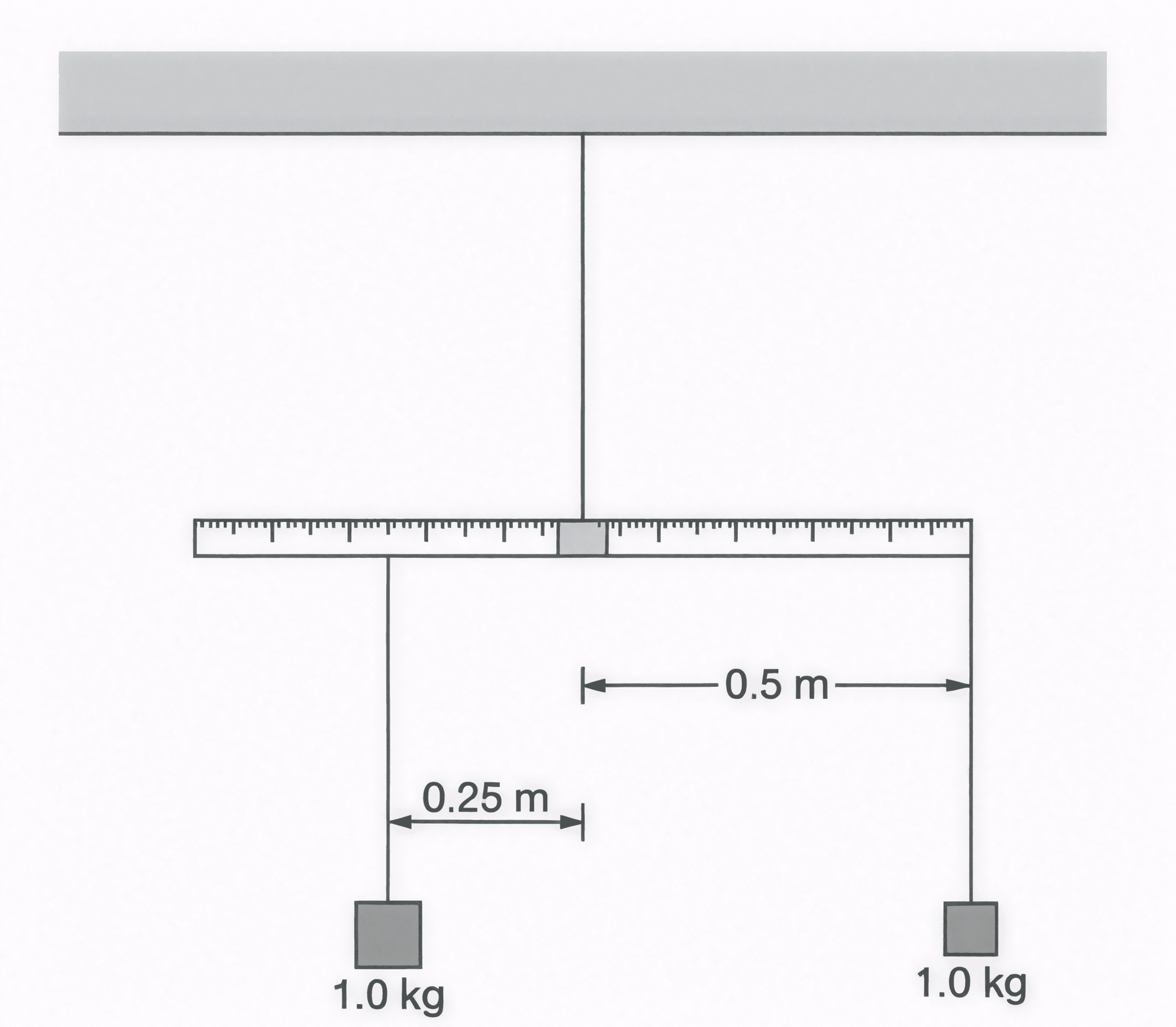
A meterstick is supported at its center, which is aligned with the center of a cradle located at position \( x = 0 \) \( \text{m} \). Two identical objects of mass \( 1.0 \) \( \text{kg} \) are suspended from the meterstick. One object hangs \( 0.25 \) \( \text{m} \) to the left of the support point, and the other object hangs \( 0.50 \) \( \text{m} \) to the right of the support point. The system is released from rest and is free to rotate. Which of the following claims correctly describes the subsequent motion of the system containing the meterstick, cradle, and the two objects?



