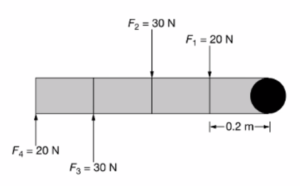
A rod may freely rotate about an axis that is perpendicular to the rod and is along the plane of the page. The rod is divided into four sections of equal length of 0.2 m each, and four forces are exerted on the rod, as shown in the figure. Frictional forces are considered negligible. Which of the following describes an additional torque that must be applied in order to keep the rod from rotating?
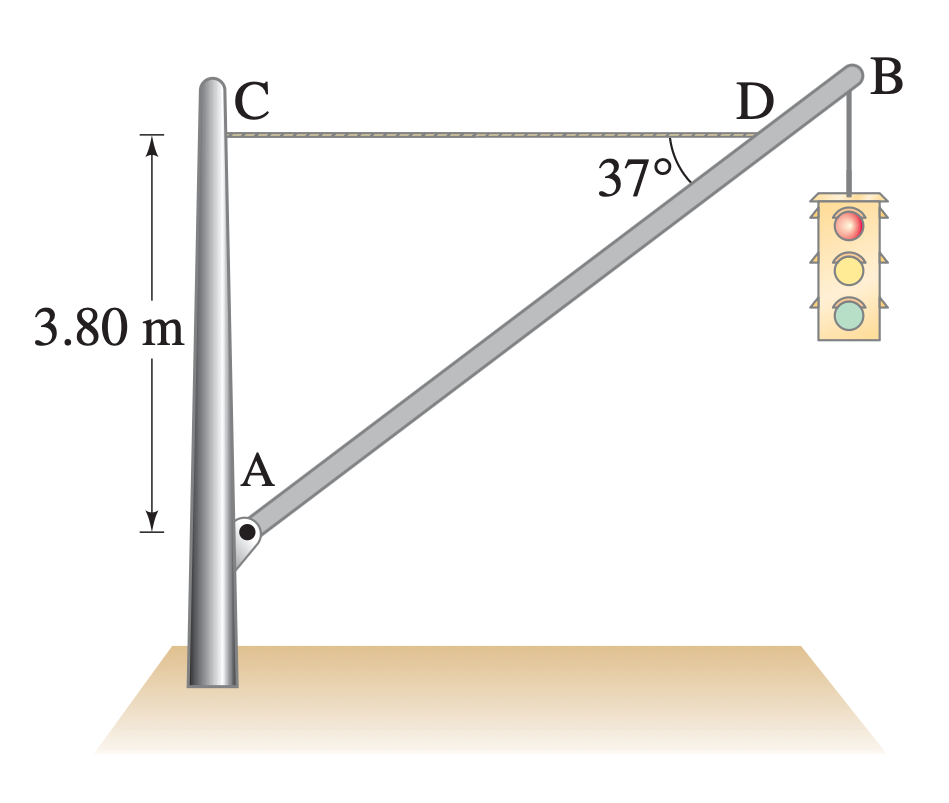
A traffic light hangs from a pole as shown in the diagram. The uniform aluminum pole AB is of length \( 7.20 \) \( \text{m} \) and has a mass of \( 12.0 \) \( \text{kg} \). The mass of the traffic light is \( 21.5 \) \( \text{kg} \). The point C is located \( 3.80 \) \( \text{m} \) vertically above the pivot A. A massless horizontal cable CD is attached at C and connects to the pole at point D, where the pole makes an angle of \( 37^{\circ} \) with the cable.
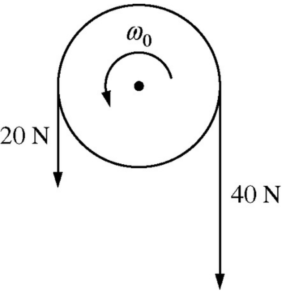
A disk is initially rotating counterclockwise around a fixed axis with angular speed \( \omega_0 \). At time \( t = 0 \), the two forces shown in the figure above are exerted on the disk. If counterclockwise is positive, which of the following could show the angular velocity of the disk as a function of time?



