
A meter stick with a uniformly distributed mass of \(0.5 \, \text{kg}\) is supported by a pivot placed at the \(0.25 \, \text{m}\) mark from the left. At the left end, a small object of mass \(1.0 \, \text{kg}\) is placed at the zero mark, and a second small object of mass \(0.5 \, \text{kg}\) is placed at the \(0.5 \, \text{m}\) mark. The meter stick is supported so that it remains horizontal, and then it is released from rest. Find the change in the angular momentum of the meter stick, one second after it is released.
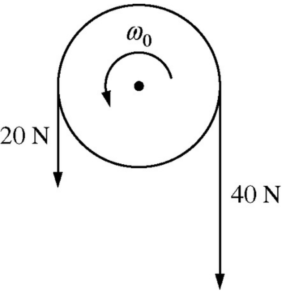
A disk is initially rotating counterclockwise around a fixed axis with angular speed \( \omega_0 \). At time \( t = 0 \), the two forces shown in the figure above are exerted on the disk. If counterclockwise is positive, which of the following could show the angular velocity of the disk as a function of time?
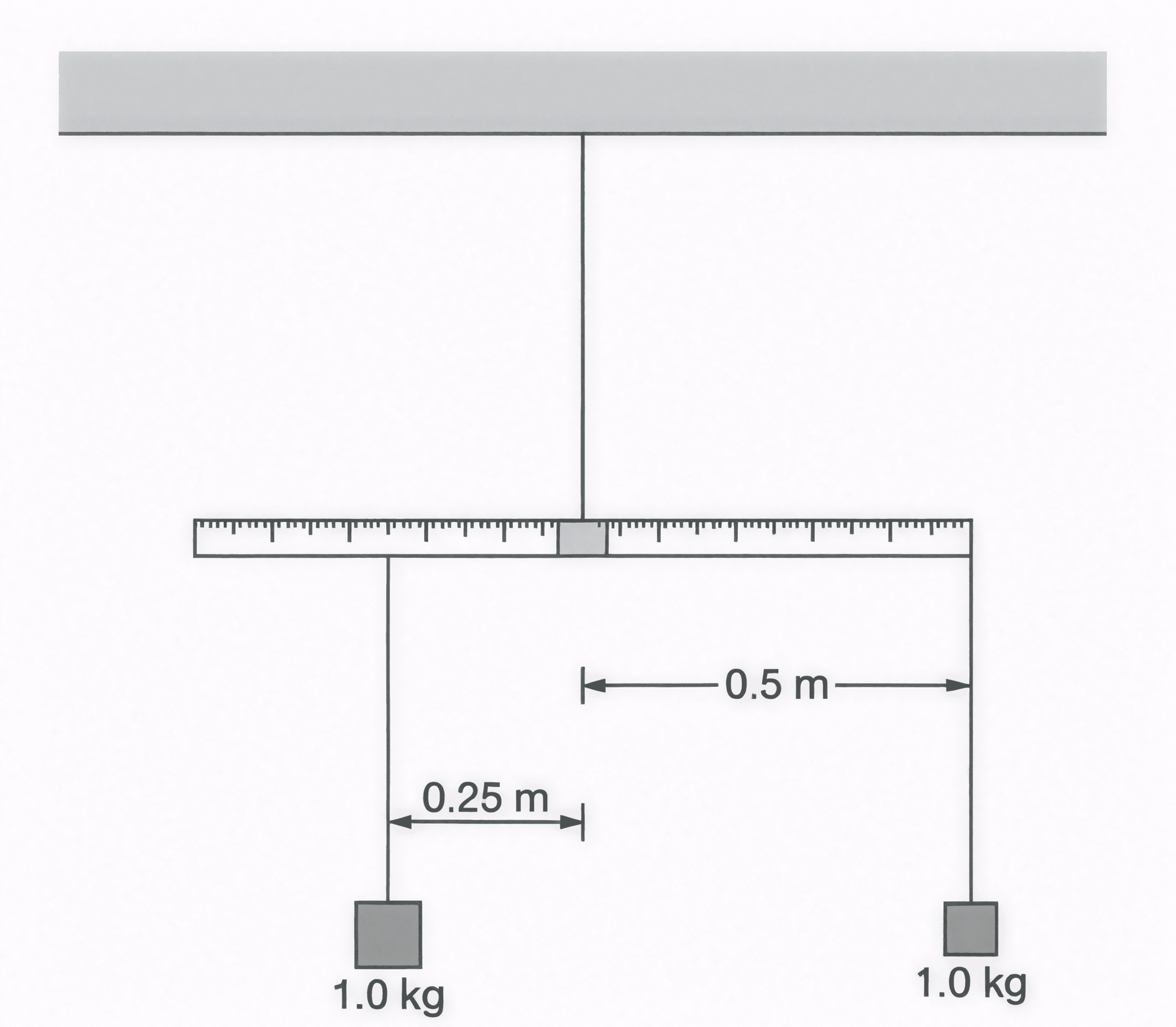
A meterstick is supported at its center, which is aligned with the center of a cradle located at position \( x = 0 \) \( \text{m} \). Two identical objects of mass \( 1.0 \) \( \text{kg} \) are suspended from the meterstick. One object hangs \( 0.25 \) \( \text{m} \) to the left of the support point, and the other object hangs \( 0.50 \) \( \text{m} \) to the right of the support point. The system is released from rest and is free to rotate. Which of the following claims correctly describes the subsequent motion of the system containing the meterstick, cradle, and the two objects?
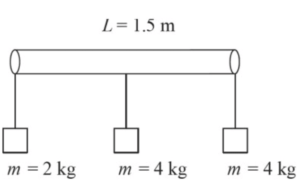
Three masses are attached to a \( 1.5 \, \text{m} \) long massless bar. Mass 1 is \( 2 \, \text{kg} \) and is attached to the far left side of the bar. Mass 2 is \( 4 \, \text{kg} \) and is attached to the far right side of the bar. Mass 3 is \( 4 \, \text{kg} \) and is attached to the middle of the bar. At what distance from the far left side of the bar can a string be attached to hold the bar up horizontally?



