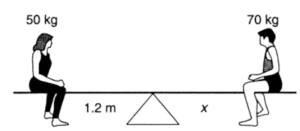
A \( 50 \, \text{kg} \) person is sitting on a seesaw \( 1.2 \, \text{m} \) from the balance point. On the other side, a \( 70 \, \text{kg} \) person is balanced. How far from the balance point is the second person sitting?
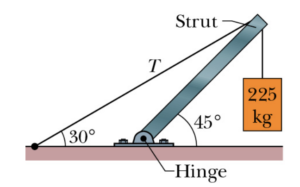
The system in the Figure is in equilibrium. A concrete block of mass 225 kg hangs from the end of a uniform strut whose mass is 45.0 kg.

A meter stick with a uniformly distributed mass of \(0.5 \, \text{kg}\) is supported by a pivot placed at the \(0.25 \, \text{m}\) mark from the left. At the left end, a small object of mass \(1.0 \, \text{kg}\) is placed at the zero mark, and a second small object of mass \(0.5 \, \text{kg}\) is placed at the \(0.5 \, \text{m}\) mark. The meter stick is supported so that it remains horizontal, and then it is released from rest. Find the change in the angular momentum of the meter stick, one second after it is released.



