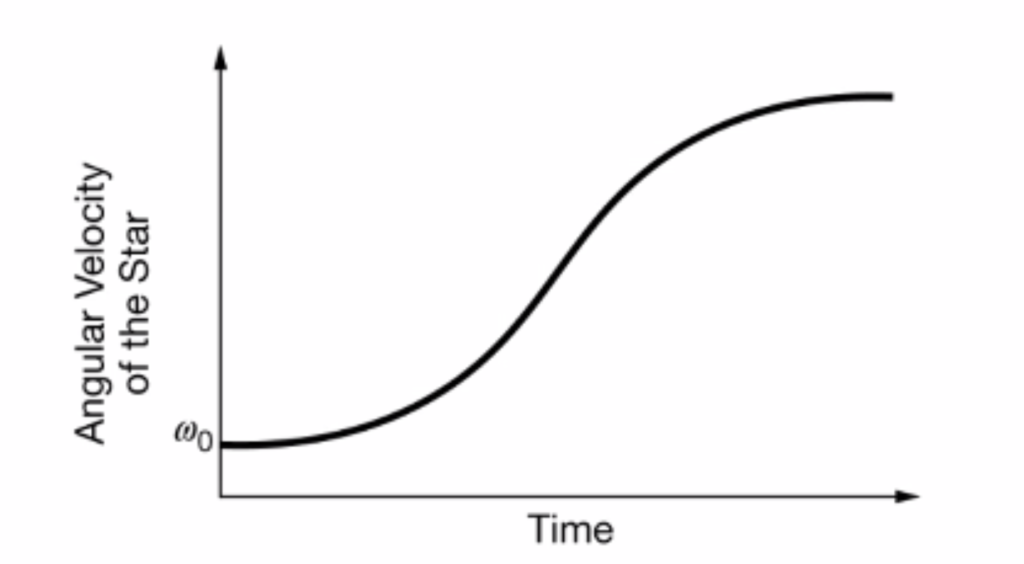
An isolated spherical star of radius \( R_o \), rotates about an axis that passes through its center with an angular velocity of \( \omega_o \). Gravitational forces within the star cause the star’s radius to collapse and decrease to a value \( r_o < R_o \), but the mass of the star remains constant. A graph of the star’s angular velocity as a function of time as it collapses is shown. Which of the following predictions is correct about the angular momentum \( L \) of the star immediately after the collapse?

In lacrosse, a typical throw is made by rotating the stick through an angle of roughly \(90^\circ\), then releasing the ball when the stick is vertical, as shown above. If the \(1 \, \text{meter}\) long stick is at rest when horizontal and the ball leaves the stick with a velocity of \(10 \, \text{m/s}\), what angular acceleration must the stick experience?
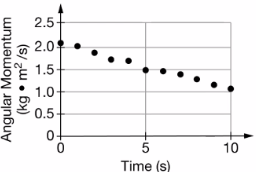
During the experiment, students collect data about the angular momentum of a rigid, uniform spinning wheel about an axle as a function of time, which was used to create the graph that is shown. A frictional torque is exerted on the wheel. A student makes the following statement about the data. “The frictional torque exerted on the wheel is independent of the wheel’s angular speed.” Does the data from the graph support the student’s statement? Justify your selection.



