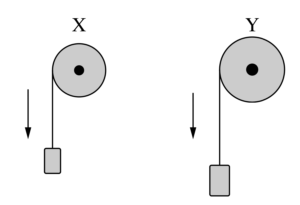
Pulleys \( X \) and \( Y \) are each attached to a block by a string that wraps around the pulley. Both blocks are released and have the same linear acceleration \( a \). As the blocks fall, the pulleys rotate about their centers. Pulley \( Y \) has a larger radius than Pulley \( X \). How does the angular acceleration \( \alpha_X \) of Pulley \( X \) compare to the angular acceleration \( \alpha_Y \) of Pulley \( Y \)?
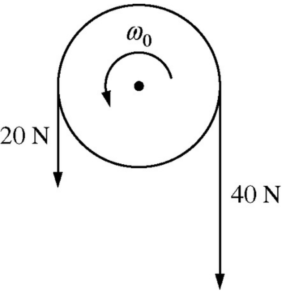
A disk is initially rotating counterclockwise around a fixed axis with angular speed \( \omega_0 \). At time \( t = 0 \), the two forces shown in the figure above are exerted on the disk. If counterclockwise is positive, which of the following could show the angular velocity of the disk as a function of time?
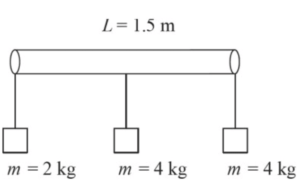
Three masses are attached to a \( 1.5 \, \text{m} \) long massless bar. Mass 1 is \( 2 \, \text{kg} \) and is attached to the far left side of the bar. Mass 2 is \( 4 \, \text{kg} \) and is attached to the far right side of the bar. Mass 3 is \( 4 \, \text{kg} \) and is attached to the middle of the bar. At what distance from the far left side of the bar can a string be attached to hold the bar up horizontally?



