

What is the net torque acting on the pivot supporting a \(10 \, \text{kilogram}\) beam \(2 \, \text{meters}\) long as shown above? Assume that the positive direction is clockwise.
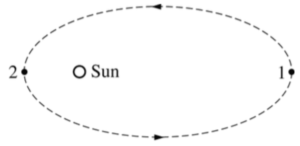
The elliptical orbit of a comet is shown above. Positions 1 and 2 are, respectively, the farthest and nearest positions to the Sun, and at position 1 the distance from the comet to the Sun is 10 times that at position 2. What is the ratio \(v_1\)/\(v_2\) of the speed of the comet at position 1 to the speed at position 2?
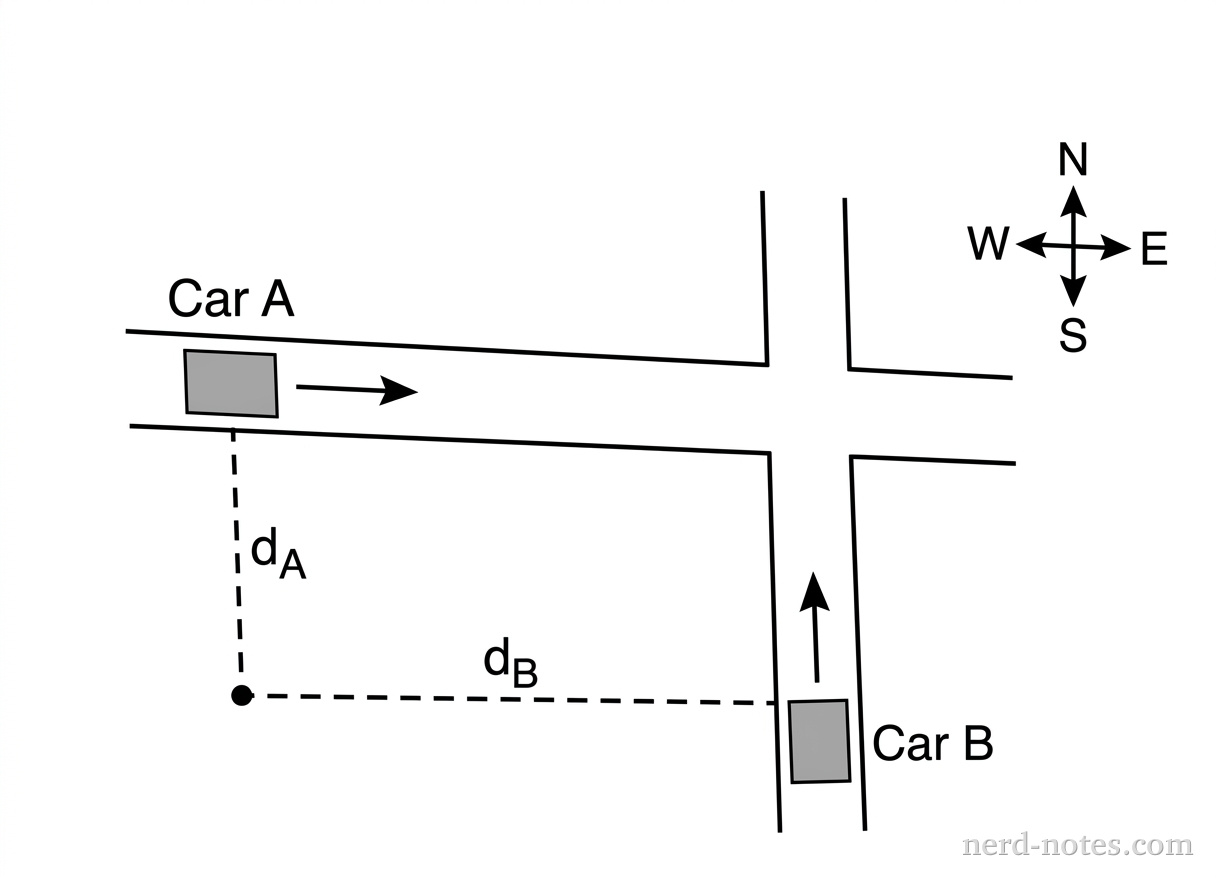
Car A of mass \( m_A \) is moving to the east along a straight road. Car B of mass \( m_B \) is moving to the north along another straight road. At the instant \( t = 0 \) shown in the figure, both cars are at their closest point to a flagpole, with Car A a distance \( d_A \) from the flagpole and Car B a distance \( d_B \) from the flagpole. The cars continue, each moving with constant speed, and reach the intersection of the two roads at time \( t = t_f \). Which of the following correctly expresses the magnitude of the total angular momentum of the two-car system about the flagpole at time \( t = 0 \)?
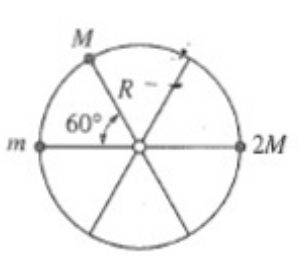
A wheel of radius \( R \) and negligible mass is mounted on a horizontal frictionless axle so that the wheel is in a vertical plane. Three small objects having masses \( m \), \( M \), and \( 2M \), respectively, are mounted on the rim of the wheel, as shown above. If the system is in static equilibrium, what is the value of \( m \) in terms of \( M \)?



